|
1.引言 当前能源短缺和环境污染日益严重,具有可持续发展的清洁可再生能源在世界范围内得到越来越广泛的关注和应用。光伏发电作为其中一种,以其取值不尽、用之不竭、廉价无污染的特点,使其有着其他新能源发电无法比拟的优势,然而受光资源时间分布不均衡和气象变化的影响,光伏电源的输出具有随机|生、波动性和间歇性的特点,导致其可调可控性较差,这种特点对智能电网将产生很大影响,涉及电力平衡、电能质量、保护配置、供电可靠、发电规划和调度运行等多方面。目前,针对光伏电源合理接人智能电网的技术研究主要集中在分析影响和对应的解决方法上旧J,而作为实现这些功能的载体通信网络技术研究较少,主要包含RS485总线,无线和电力线载波3种方式,每种方式的特点和研究如下: RS485总线实现的通信网络技术简单成熟,期刊论文中很少有专门针对其研究的,技术优点是传输速率高和网络可靠性较强,缺点是需要专门布置通信线,在大面积光伏发电系统中将带来的成本和维护压力。 无线方面,当前文献主要研究不同无线方式组成的光伏通信网络技术,文献[3]提出一种基于Zig—Bee方式构建光伏系统通信网络架构,受该无线技术穿透陛弱的影响,通信子节点只监测到逆变器组件,未监测其他组件,通信网络覆盖范围较小。文献[4]提出了一种以GSM方式实现的通信网络,有效避免其他无线方式穿透性弱,通信节点安装位置有特定要求的缺点,但考虑到其通信过程中所产生的大量流量费用,实际应用性不强。文献[5]从光伏系统中无线通信节点位置部署角度提出了两种部署算法,从理论算法角度提高无线通信网络的稳定性,但位置点设计过于理想化,光伏组件实际不太可能按照该部署进行安装。 电力线载波方面,文献主要针对不同调制方式下光伏PLC通信技术展开研究,文献[6-7]分别提出了基于8-PSK和ASK的调制方式的光伏PLC通信网络,利用系统内直流电力线传输数据,不必考虑通信节点安装位置,具有无需额外布线和维护方便的优点,但二者均未解决在这些调制方式下存在的传输速率低,抗干扰性差的缺点,文献[8-9]则提出基于FSK调制方式的光伏系统通信架构,基于单频点调制传输的方式,同样存在传输速率低且组网能力差的技术缺点。 综合以上文献的研究可知,当前光伏通信网络虽然具有不同技术解决方案,但是每种解决方案均存在其对应的技术缺点,总线技术通信组网需额外布线,无线技术穿透性弱,节点位置选择性强,电力线载波的低速率、不稳定等,使它们形成的通信网络均无法支撑当前智能电网对光伏发电系统管理预测调控的技术需求。 OFDM高速窄带电力线载波技术的发展¨.,克服了当前载波技术的抗干扰性差,速度低的缺点,本文将该技术引入到光伏通信网络中,解决上面通信技术中出现的额外布线、穿透性弱、位置选择性强等缺点,基于G3一PLC技术给出适合光伏测量体系通信技术需求的接人终端和网络架构,研究分析通信网络的可靠性、互操作性、高速性和安全性,结合mesh网络拓扑和动态自适应组网技术,搭建实验环境进行组网测试,建立符合智能电网建设需求的光伏测量系统通信网络。 2.系统通信网络技术方案
2.1 G3J.LC技术 G3.PLC技术是基于OFDM技术的高速窄带电力线载波技术体系,文献[11.12]分析了该技术具体特性和应用在智能电网中的实验验证,文献[13]提出了基于该技术实现的适合于高级测量体系的智能电表实现,各种文献的研究结果表明该技术在不同应用场合下均满足智能电网建设发展,本文在光伏监控通信中引入G3一PLC技术,基于该技术给出适合智能电网发展的光伏系统测量体系通信系统,具有以下技术特点: 1)支持OFDM的PHY设计,支持DBPSK,DQPSK,D8PSK调制,频谱使用率达到最大化; 2)支持CELELEC、ARIB、FCC(10—490 kHz); 3)标准制定参考IEEE,rrU,IEC/CENELEC和IEC/IAE; 4)两级前向纠错(FEC)功能,确保恶劣环境下的数据可靠通信,特有的ROBO模式有效改善嘈杂信道条件下的通信; 5)自适应选择当前最佳传输频带,相邻节点间信道评估机制选择出最佳调制模式; 6)6LoWPAN适配层支持电力线上直接传输IPV6数据包; 7)AES-128加密引擎保证数据传输的安全性; 8)MESH网络,自适应选择最佳传输路径。 2.2基于G3_PLC的光伏测量体系通信网络架构 根据G3_PLC组网技术,要实现组网需求,负责通信组网的接入终端需分为主、子两类,子通信接入终端分布在系统内各个光伏组件边,负责对应光伏组件的信息数据采集,利用载波模块通过交直流电力线组网传输,主通信接入终端分布在逆变器边,负责整个局域网网络的管理控制,实现电网主站系统与其网络内各组件单元的双向信息交互。整体系统通信网络架构图如图l所示。 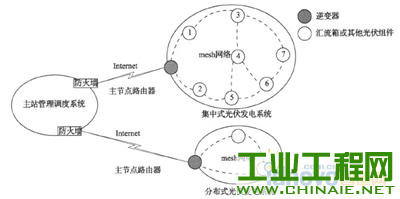 图1 系统通信网络架构示意 3.通信接入终端硬件实现 通信网络中,接人终端采用的是OFDM调制方式,信号的编码调制通过集成的芯片来实现,内部采用了R.s编码作为外码,纠正随机符号错误和随机突发错误,以卷积码为内码,采用二级级联编码的方式在降低译码复杂度的同时提供很高的数据可靠性。针对恶劣环境的Robust传输模式,使系统更可靠,抗干扰能力更强。同时,信号经过调制输出芯片后,需经过线路驱动单元实现对信号的功率放大,该单元一般由集成运放和功率放大电路组成,线路耦合器主要是将放大的OFDM信号耦合到交直流电力线上,并起到隔离作用,耦合方式采用的是电感和电容相配合的方式。OFDM模块实现框图如图2所示。 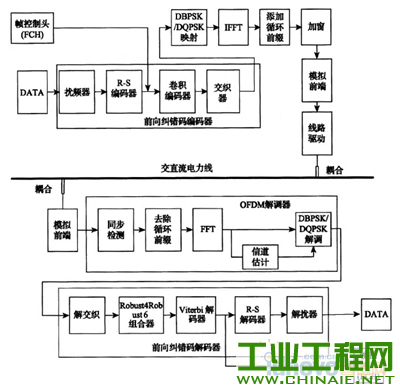 图2 OFDM载波模块实现 OFDM模块电路作为光伏测量体系通信接人终端的一部分,负责完成信号的调制耦合电力线传输,包含其他模块的硬件总体结构如图3所示,包括MCU、存储模块、时钟模块、看门狗模块、电源管理模块遥信采集模块、遥控输出模块、模拟量采集模块、OFDM载波模块、RS485接口、RS232接口等,主子通信节点在硬件上的主要区别就是主单元具有网络接口,实现其管理范围内的局域网与外部的广域网互联。 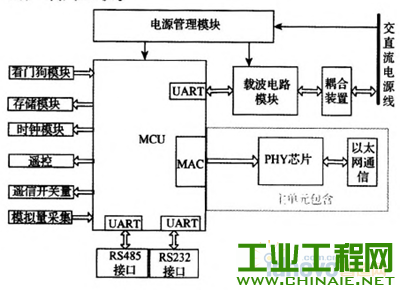 图3通信接入终端硬件结构 在通信组网系统中,主通信终端主要起着网络管理和系统内各子设备路由工作,是系统内的局域网与外部广域网的网关,为方便组网布点主通信单元的载波信号通常是耦合在给其供电的交流电源线上。子通信单元的载波信号是耦合在系统中各个组件设备的直流电力线上,经过测试直流电力线上的数据在逆变器正常工作时无法透传到其另一侧的交流电力线上,为保障系统内的直流电力线和并网点的交流电力线之间的数据通信,设计出交直流连通器,其结构如图4所示,交直流电力线上的OFDM载波信号均可通过中间的磁环耦合到对方的电力线上,实现数据互通。 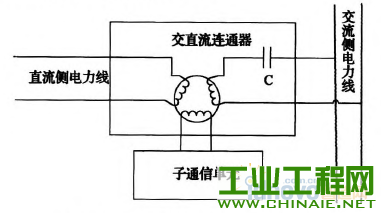 图4交直流连通器结构图 图5显示出OFDM信号经过交直流连通器的图形,从图中可以看出OFDM信号被完整的耦合到另一边。 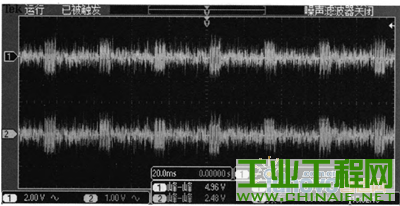 图5磁环两边OFDM信号 4.通信网络特性分析 光伏系统测量体系主要是实现对光伏发电站内各组件实时运行信息的监测和控制,利用系统内交直流电力线作为信息传输载体,通过安装在各光伏组件旁的主子通信节点单元形成通信网络,基于G3一PLC的窄带OFDM调制技术使其网络在可靠性,互操作性,数据传输高速性和安全性上均表现优异,为测量体系应用中的信息交互提供安全稳定高速通道,相关特性分析如下: 1)可靠性 光伏测量通信网络各节点处的通信终端通过硬软两方面提高交直流电力线上传输数据的可靠性,硬件方面是采用抗干扰性强的多载波数字调制OFDM技术,能够克服传统单频载波解决不好的码间干扰(ISI)和信道干扰(ICI),软件方面则引人Mesh网络拓扑技术,动态自适应选择最佳传输路由路径,当光伏发电系统中增减通信终端或某时段某条电力线路干扰严重无法传输数据时,可自动发现网络拓扑的变化,同步调整各节点通信路由。如图l中所示,集中式光伏发电系统形成的Mesh网络中子节点3—7由于距离较远不能和主节点直接通信,需通过子节点1或者2中继,系统会依据当前电力线的实际情况判断走1中继还是2中继,某时刻这两个中继其中一个周围受干扰无法传输数据,不影响系统的整个网络。这种软硬相结合的方式使各通信终端在光伏系统错综复杂的现场环境下,能够快速建立测量系统通信网络架构,实现各组件信息数据可靠稳定交互。 2)互操作性 互操作性是指不同的应用系统或智能设备之间可以无障碍进行信息交换,具备协同操作功能。基于G3_PLC的光伏测量体系通信网络中各通信终端支持IPv6协议,通过对应的压缩和映射可在电力线上传输IPv6数据包,支持TCP/IP协议,为不同系统间互操作语义和接口提供了一致的网络环境,实现端对端的无缝运行,为主站系统与光伏发电系统现场设备间提供一致的通信协议,实现主站系统直接与现场设备的双向通信,避免协议转换。通信接人终端通过6LoWPAN适配层实现广域网网络报文到电力线报文的转变,MAC层技术实现流程参考无线个人局域网协议IEEE802.15.4ll引,物理层实现OFDM调制,主通信节点收到含光伏测量应用数据的TCP/IP报文,通过6LoWPAN适配层对报文头进行压缩,由标准48个字节压缩到5个字节,再将报文传输到MAC层,MAC层按协议完成组帧后传给PHY层,PHY层完成该层的组帧后发送给OFDM模块,由其耦合到电力线上传输,报文流程结构如图6所示。 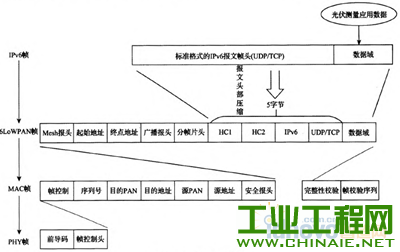 图6报文流程结构 同时,考虑某些光伏测量应用数据较多,导致互操作单帧报文长度较长,而电力线作为一种非均匀分布的传输线,传输信道特性十分复杂,环境恶劣多变,不适合连续传输长报文,文献[15]提出了一种分片重传机制,化长为多短,确保电力线上的长帧报文的可靠传输。 3)高速性 传统PLC通信技术,数据基于单频率调制,传输速率最高只达到几Kbps,难以满足将来光伏测量系统各种高级应用的实现,基于G3一PLC的光伏测量体系通信终端采用OFDM技术,从频段利用和调制方式两方面提高数据传输速率: ①频段方面 频段划分时引用正交频分复用技术,相同带宽条件下增加划分子载波的个数,最大化提高频带利用率,如果用N表示划分子载波的个数,r表示OFDM符号的持续时间(周期),di(i=0,1,2,......,N一1)表示分配给每个子信道的数据符号,i表示第i个子载波的载波频率,矩形函数rect(t)=1,ItI≤T/2,则从t=t,开始的OFDM符号式(1)所示,由公式可见一个OFDM符号由划分的Ⅳ个子载波叠加而成。 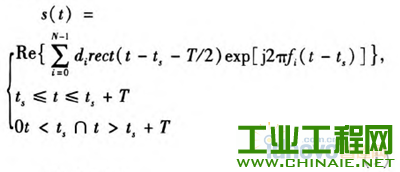 ②调制方式 子载波划分完成后,传输数据依据当前选用的调制方式按比特分配到子载波上,基于G3一PLC的通信终端包含调制方式有DBPSK,DQPSK,D8PSK3种方式,对应的调制方式编码星座图如图7所示。 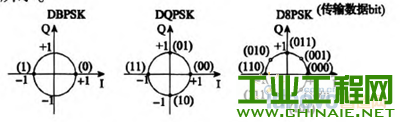 图7调制方式编码星座图 调制方式将传输数据按照图8的星座图映射到各子载波的幅度和相位上,通信终端具体选择何种调制方式依据当前光伏测量系统中的交直流电力线环境而定,恶劣时,自适应DBPSK方式,降低速率保证传输可靠,正常优良时,自适应DQPSK或D8PSK,提高传输速率。 本文设计的基于G3一PLC通信终端可支持多种频段,实际应用中通过更新芯片对应的固件来实现,不过同一个光伏测量系统通信网络只能应用在一种频段下,表1给出了通信终端支持的频段和对应的传输速率范围。 表1不同频段的传输速率对比 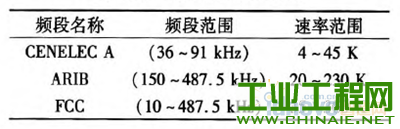 4)安全性 目前应用光伏测量体系,不管是有线方式还是无线方式,信息交互均未进行安全认证,各组件之间的数据交互安全性得不到可靠保障,本文中基于G3一PLc技术的通信终端在组网开始阶段先对所有申请加入网络的子节点设备进行安全认证,在鉴别认证成功后建立安全通信信道,分配网络PANID和设备标识ID,未认证的和认证失败的子设备无法获取对应的ID,不能和主节点进行数据通信,保障后续数据报文传输的安全性,安全认证流程在各通信终端的6LoWPAN适配层完成,内部硬件集成AES.128加密引擎为认证提供算法支持,具体应用中的认证流程为: ①光伏测量系统通信终端主节点初始化成功后,基于系统的交直流电力线形成一个PAN—ID标识的局域网。 ②光伏组件旁通信终端上电后,通过交直流电力线,发起request请求,申请加入网络。 ③通信终端主节点收到请求后发起EAP—PSK认证流程,和请求入网的通信终端通过4条MSG报文完成认证,如图8中(1)所示,MSG报文中Flags为EAP协议的报头部分,ID—S、ID—P为预设的EUI-64 MAC地址,RAND_P和RAND—S分别为主子节点生成的128bit随机数,报文中认证码的计算方式见式(2)和(3):MAC—S=CMAC—AES-128(AK,ID—S RAND—P) (2)MAC_P=CMAC—AES一128(AK,ID—P ID—SRAND—SIIRAND—P) (3)第3条和第4条MSG消息报文中还包含了EAP.PSK的消息扩展部分,包含了认证的单步结果和需交换的信息,如主节点分发的GMK密钥等。 ④主通信终端和请求入网的通信终端通过4条MSG报文互相认证后,确认了请求人网的通信终端安全合法性,主通信终端发送两条accepted消息结束认证过程,acceptedl表示认证流程已完成,建立了安全通信信道,accepted2则根据当前网络分配给子设备对应的网络PAN ID和设备标识ID,用以后续数据通信寻址。 另外,在某些对安全性要求不太高的环境中,安全认证也可简化,不进行EAP—PSK相互认证协议,提高组网速度,流程如图8中的(2)所示。在光伏测量体系通信网络中,可依据现场实际应用情况灵活选择其中一种认证方式: 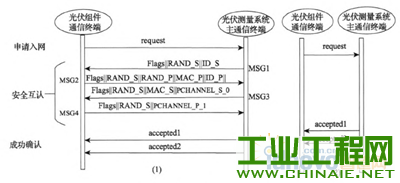 图8组网安全认证流程 5.组网验证 为验证基于G3一PLC的光伏测量体系通信网络特性,需实际展开组网和通信能力测试,本文基于实际的10 kW光伏发电系统和室内用电交流系统搭建测试环境,10 kW光伏发电系统位于楼顶,系统由光伏电池阵列、两台汇流箱和一台逆变器组成,并网接人楼层内380 V照明用电电路,光伏测量通信网络基于光伏系统的直流电力线和楼内的交流电力线而建,包含1主12子通信终端,各通信终端接人位置和通信数据如表2所示。 表2光伏测量通信网络测试环境 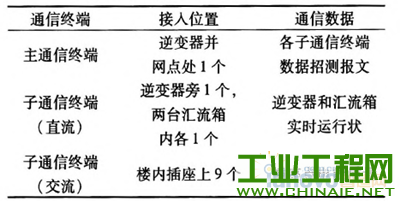 5.1动态自适应mesh组网测试 首先位于逆变器并网点插座处的主通信终端上电初始化形成具有唯一标识的局域网,其他位于交直流电力线上的子通信终端上电发送请求加入网络,主子终端安全认证通过后建立安全信道,各子通信终端获得主通信终端分配的网内唯一标识ID,实际上电测试各子通信终端均通过安全认证加人网络,具体分配的网络内ID如下: 逆变器旁子通信终端:ID=0x08汇流箱内两个子通信终端:ID=0x02,0x09插座上9个子通信终端:ID=0x18,0x07,0x12,0x16,0x13,0x03,0x10,x014,0x17图9所示为实验中12个子节点组网成功后的网络拓扑图,直流电力线和交流电力线上的通信终端通过耦合点形成同一网络,最大路由深度为3跳,其路由路径选择较均匀,各节点承载均衡,在数据通信时能提供可靠稳定的网络保障。 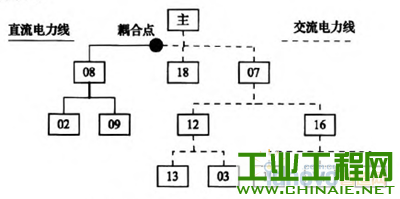 图9 mesh网络自适应拓扑 由图9的拓扑图可知,各子通信终端的路径深度不同,存在路由路径选择和修复问题,为保障安全信道内的数据可靠传输,基于G3一PLC的通信终端路由技术和修复过程基于“6LoWPAN Ad Hoc OnDemand Distance Vector Routing(LOAD)”路由标准¨6’17 J。路由只在有数据报文发送时候才触发,通过路由消息报文实现,不会单独主动触发,同时针对应电力线信道的自身特点,文献[18]提出适应电力线组网的LOADng技术,在原来的LOAD基础上增加了非对称路由路径选择,减少路由广播报文的发送等修改,保证了光伏通信网络的稳定性和可靠性,路由路径的选择通过路由广播报文RREQ中的路由代价Lcosr值来判断,Lcosr则有相邻节点的链接代价叠加而来,算法如式(4)所示: 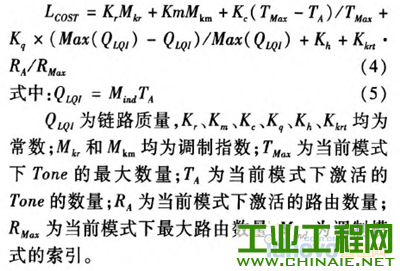 5.2通信测试 分布在各组件旁的子通信终端安全认证加人网络组网成功后,上位机软件模拟主站通过并网点的主通信终端分别对各子通信终端进行数据招测通信测试,直流电力线上各终端返回的是光伏组件的实时运行状态数据,交流电力线上各终端返回的是插座点的当前电能质量数据,测试结果如表3所示,每个节点数据传输报文长度为250 bytes,点对点的传输报文来回时间为343.75 ms,扣除报文经过上位机测试平台的串口,主子节点MCU对应的端口接收时间和帧处理时间,测试中端口波特率设定为115 200 bps,因此一帧报文通过端口的时间大约为22 ms,主子节点软件中帧等待时间设置为100 ms因此可计算出报文在电力线上单向传输时间为39 ms,对应得出报文在当前自适应调制模式下的传输率为64 Kbps,符合前面所作的速率分析。且发送接收数据包未出现丢失现象,网络可靠性较强。 表3数据通信结果 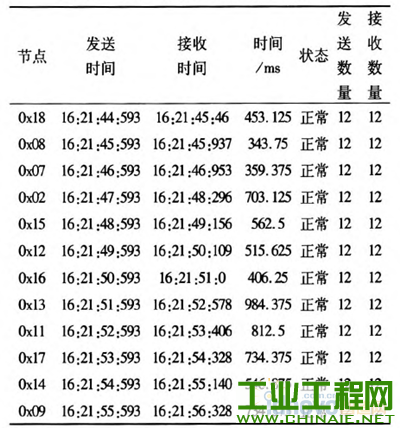 同时,在网络中某个节点发生故障时,原本路由是使用该节点的其他节点也会自动修复路径,选择其相邻的其他节点代替,有效保障了数据传输的稳定性,实验的结果表明基于G3一PLC的自适应组网系统能够为光伏测量体系提供高速,稳定,抗干扰性强的双向通信网络。 6.结论 本文展开对适合光伏测量体系通信组网技术的研究,引入OFDM技术,基于G3一PLC标准,开发满足组网需求的主子通信接人终端,研究其各项特性,实现光伏系统内各组件的网络化互联,解决了现有通信方式存在的中存在的不稳定、接线复杂、速度低、可靠性差等缺点,匹配了上层主站系统高级应用功能的实现的通信技术需求,结合mesh网络拓扑、路由技术,研究网络自适应组网能力,提供稳定健壮的网络环境和高速可靠的数据传输,为光伏测量体系的实现提供技术基础,也为智能电网通信接人技术提供一种有效可行的参考方案。 |
 /2
/2 







