|
0 引 言 三维空间助力机械臂是一个复杂的动力学系统,它由多个关节和多个运动构件组成,各关节与运动构件之间存在复杂的耦合关系。为了机械臂的结构设计以及控制系统的开发与优化,对机械臂进行动力学分析与研究是非常重要的。越来越多设计人员将虚拟样机仿真作为机械系统研发的重要依据,相比传统机械设计而言,节省了物理样机的实验时间以及材料,缩短了设计周期,提高了机械臂工作性能。目前动力学分析领域中的方法主要包括拉格朗日法、牛顿-欧拉法、高斯方法、凯恩法、旋量法等,ADAMS是一款以计算多体动力学为基础的虚拟样机仿真分析软件,可以对虚拟机械系统进行静力学、运动学和动力学进行仿真计算;本文以四自由度空间助力机械臂为研究对象,用Solid Works建立机械臂的装配体,运用拉格朗日方法对机械臂进行动力学建模,并用ADAMS进行动力学分析,为机械臂实际物理样机的结构优化和控制研究提供依据。 1 机械臂组成部分及坐标系的建立 空间助力机械臂各个关节均为转动连接,整个机构有底座、转动平台、平行臂、腕关节等组成。利用修正D-H法建立坐标系,三维空间助力机械臂的平面结构简图,如图1所示。 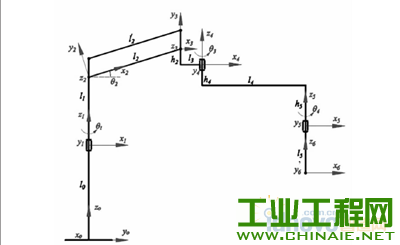 图1 机械劈平面机构简图 2 动力学方程的建立 2.1 连杆质心位置的求解  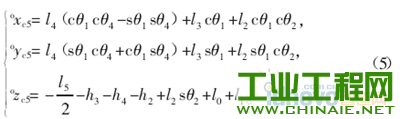 2.2 连杆动能和势能的求解对质心坐标求导并代入动能公式,则各连杆动能为: 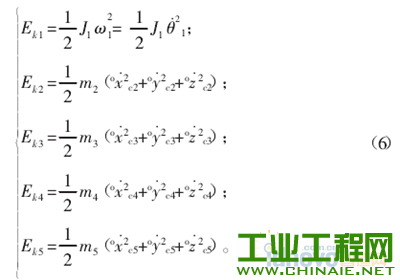 机械臂系统总动能为:Ek=Ek1+Ek2+Ek3+Ek4+Ek5。 假设地面为零势能面,则各连杆势能为: 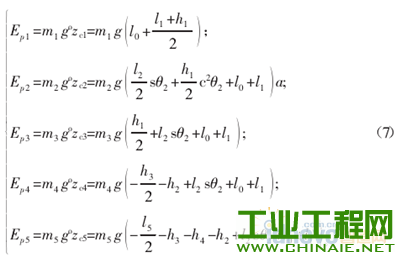 机械臂系统总势能为:Ep=Ep1+Ep2+Ep3+Ep4+Ep5。 综上,拉格朗日函数L为L=Ek—Ep。 (8) 2.3 系统动力学方程的建立 对式(8)求偏导数并带入第二类拉格朗日动力学公式,得到关节1、2、4的力矩为:  因关节3与关节2力矩大小相等,方向相反,故只计算关节2力矩即可,从而得到三维空间机械臂动力学方程为: 式中:D(q)为惯性矩阵,D(q)q为机械臂所受惯性力;H(q,q)为离心力与科氏力矩阵;G(q)为重力矩阵;τ为关节力矩矩阵。 3 ADAMS环境下动力学仿真 3.1 ADAMS动力学仿真环境设置 在Solid Works软件中将装配好的机械臂模型保存成与ADAMS的交互格式Parasolid,在ADAMS中,以实际物理样机属性为标准,对模型的各个构件进行编辑,赋予其材料、质量等属性,便于仿真得到更加可靠的实验结果。添加各运动副之间的约束和驱动,空间助力机械臂的ADAMS仿真模型如图2所示。 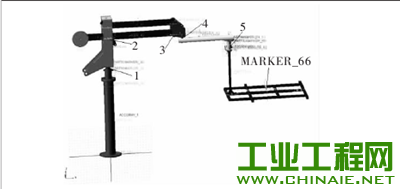 图2 机械臂的ADAMS仿真模型图 3.2 ADAMS动力学仿真 末端MARKER_66添加驱动函数如下: 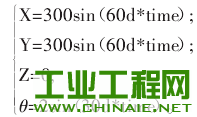 将驱动函数导入虚拟样机的动力学模型中,利用ADAMS的测量功能,得到各转动副关节驱动力矩的大小如图3所示。 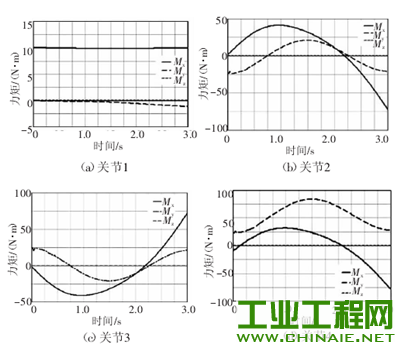 图3 空间助力机械臂各关节力矩图 4 结 语 对空间助力机械臂进行适当简化,根据已知条件,运用拉格朗日方法建立空间助力机械臂的动力学理论模型,利用ADAMS进行动力学分析与研究,得到各个关节的力矩图像,符合实际运动的要求,同时验证了虚拟样机仿真模型的合理性。为工业助力机械臂的结构设计和控制系统的开发与优化提供了依据,也为后续机械臂的动态特性及控制的研究打下基础。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20


 /1
/1