|
1.机床研究的背景及意义 数控机床是一种集精密机械、计算机技术、自动控制技术于一体的典型机电液一体化设备,是机械制造业的重要组成部分。重型数控动梁龙门镗铣床能进行多任务加工,并能使工件获得很好的加工精度和表面质量,可广泛用于国防、军工、发电设备、航空航天、能源交通、模具制造等行业的大型精密零件加工。国外生产数控龙门铣床的企业主要有德国希斯(SCHIESS)、德国科堡(WALDRICH COBURG)、日本本间(HOMMA)等公司,这些国外公司一直对技术进行垄断,我国的高端数控动梁龙门镗铣床只能依赖进口。研制高端桥式数控动梁龙门镗铣床,既可以满足国内高速经济发展的需求,替代进口,打破国外的技术封锁,实现在“高、精、尖”重大数控装备上的突破,又可以提高制造业基础装备的能力,提升国家装备业的核心竞争力,为国家的军事、航天、航空等诸多领域提供装备保障。 2. XK2860型桥式数控动梁龙门镗铣床介绍 本文研制的XK2860型桥式数控动梁龙门镗铣床是在多年生产数控升降台铣床、数控落地铣镗床及数控动梁龙门镗铣床的基础上,充分把握当今数控机床的发展趋势和利用现代机床制造业的新技术、新工艺,自主研制的具有自主知识产权的一种新产品,具有高性能、高精度、高效率、高可靠性的特点,该重型机床广泛采用当今世界最先进的技术,达到国际先进水平。它的研制成功,对提升国家装备业的核心竞争力,具有重要的意义,同时满足了市场需求,全力实现了企业的技术升级,取代了进口,为民族工业的发展做出了应有的贡献。机床的主要组成部分图1所示。 XK2860型桥式数控动梁龙门镗铣床采用桥式布局。机床由左右床身、左右滑座、落地平台、龙门架、副龙门架、横梁、联接梁、溜板箱、主轴箱、方滑枕、附件、附件交换车、静压站、液压站、冷却器、排屑器、电气操作间、按钮站及电气柜等主要部分组成。 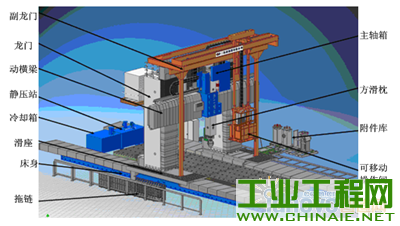 图1 数控动梁龙门镗铣床的主要组成部分 3. 数控系统的选型
3.1数控系统选型原则 数控系统的选型关系到机床的整体性能,要求在充分了解机床的结构、功能的基础上与机床性能相匹配,要求数控系统既要有优良的控制特性、较高的抗干扰性能、平稳的加减速特性等性能,又要有良好的人机接口、便于开发、更改参数方便快捷的优点,因此在选取数控系统时需要对数控系统进行综合评价,一般遵循以下几个基本原则: (1) 数控系统的功能一定要合适,这是基本原则,具有扩展功能可进行选择; (2) 要求数控系统具有优良的控制特性、较高的抗干扰性能、故障率低,同时还要求数控系统具有较长的使用寿命,对工厂的空气湿度、粉尘等要求不能太高; (3) 数控系统要具有平稳的加减速特性,使机械震动较小,在高速高精度加工时,定位误差小; (4) 产品要有良好的人机接口,便于开发和修改程序,方便调试; (5) 优先选择能够成套提供伺服驱动器和主轴驱动器的厂家,有利于维修和管理,兼容性好; (6) 性能价格比要高,维护方便,系统的市场寿命要长,否则几年后将找不到维护备件; (7) 尽量选用著名公司的产品,因为著名公司的维修和售后服务较好,信誉高; (8) 因操作人员是机床的最终使用者,因此要求数控系统对用户来讲要操作容易、可靠性高、通用性强。 综合以上原则,最后决定采用西门子SINUMERIK 840D数控系统。 3.2 840D数控系统介绍 SINUMERIK 840D数控系统是西门子公司在20世纪90年代推出的一款高性能数控系统。它具有与西门子前两代系统SINUMERIK 880和840C一样的三个CPU结构:即人机通信CPU、数字控制CPU和可编程逻辑控制器CPU,三个CPU在功能上既相互独立,又相互联系。SINUMERIK 840D是建立在一个综合的系统平台上,通过不同的系统设定功能从而能够而适用于几乎所有的控制系统。SINUMERIK 840D与SIMODRIVE 611D数字驱动系统和SIMATIC S7可编程控制器一起构成了一个全数字控制系统,用于各种复杂零件的加工任务。同时SINUMERIK 840D具有很高的开放性,机床制造厂商可以在此数控系统中集成公司特有的专业技术和工艺,突出与其他机床制造厂商的区别。 3.3 SINUMERIK 840D硬件组成 西门子SINUMERIK 840D数控系统的结构框图如图2所示。 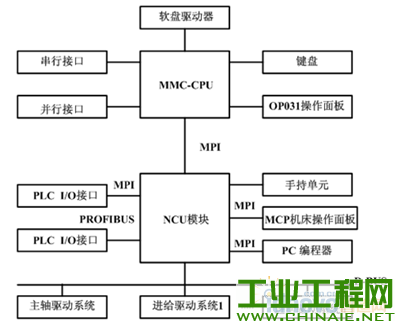 图2 840D数控系统的硬件结构框图 3.4确定SINUMERIK 840D数控系统硬件型号 目前SINUMERIK 840D的NCU最新版本为NCU573.5,根据数控系统选型基本原则的第2条故选择NCU573.5。 根据数控系统选型基本原则的第8条选择PCU50、OP015A、MCP 483C、B-MPI手持单元,具体型号如下: PCU50:6FC5210-0DF31-2AA0 OP015A:6FC5203-0AF05-0AB0 MCP483C:6FC5203-0AF22-0AA2 B-MPI:6FX2007-1AC04 电机的选择需要与各轴的最高转速、扭矩和负载惯量相匹配,根据机械设计提供的负载数据,利用如下公式确定电机的基本参数: 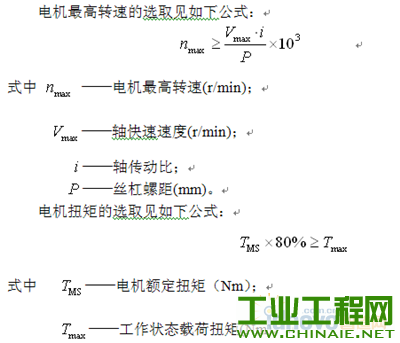 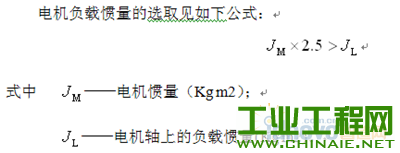 根据以上公式选取电机型号如下: 主轴电机:1PH7224-2NF13-0CJ2,最高转速为4500rpm,额定扭矩为636NM,惯量为650 Kg m2。 滑座电机:1FT6136-6AB71-4AK1,额定转速为1500rpm,额定扭矩为62NM,额定功率为9.7KW。 溜板箱电机:1FT6136-8AB71-4AL1,额定转速为1500rpm,额定扭矩为61NM,额定功率为9.6KW。 滑枕电机:1FT6136-8AB71-4AB1,额定转速为1500rpm,额定扭矩为61NM,额定功率为9.6KW。 横梁电机:1FT6132-6SF71-4AL1,额定转速为3000rpm,额定扭矩为90NM,额定功率为22KW。 根据电机功率的大小选取与电机功率对应的驱动模块。电源模块的大小是由机床各轴负载大小决定的,电源模块的功率需要大于主轴电机和进给电机功率总和,并且留有一定的裕量,这样才可以防止电源模块因功率过小而损坏。 电机驱动模块的型号如下: 主轴电机驱动模块:6SN1123-1AA00-0KA1,额定电流200A。 滑座电机驱动模块:6SN1123-1AA00-0DA1,额定电流28A。 溜板箱电机驱动模块:6SN1123-1AA00-0DA1,额定电流28A。 滑枕电机驱动模块:6SN1123-1AA00-0DA1,额定电流28A。 横梁电机驱动模块:6SN1123-1AA00-0KA1,额定电流140A。 数字接口控制单元:6SN1118-0DM33-0AA1 根据各轴驱动模块的功率大小选取电源模块及滤波组件的型号如下: 120KW I/RF电源模块:6SN1145-1BB00-0FA1 80KW I/RF电源模块:6SN1145-1BB00-0EA1 120KW HF输入滤波器组件:6SL3000-0FE31-2BA0 80KW HF输入滤波器组件:6SL3000-0FE28-0BA0 电源模块风机:6SN1162-0BA02-0AA1 根据实际应用选取PLC型号如下: IM361接口模块:6ES7361-3CA01-0AA0 SM321数字量输入模块:6ES7321-1BL00-0AA0 SM322数字量输出模块:6ES7322-1BL00-0AA0 SM322晶闸管输出模块:6ES7322-1FL00-0AA0 SM332模拟量输出模块:6ES7332-5HB01-0AB0 4.控制系统总体设计 4.1控制系统设计 即使数控系统的各项指标与机床各项数据相匹配,但控制系统设计的优劣同样关系到机床最终的性能,因此机床在控制系统设计上首先要确定总体的控制方案,然后再对各基本模块进行设计工作。控制系统主要包括NCU单元、电源模块、伺服驱动模块、伺服电机、位置检测元件、PLC模块等部件。控制系统硬件连接原理图如图3所示。 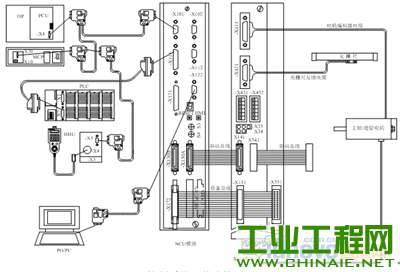 图3 控制系统硬件连接原理图 根据以上设计思路最终确定电源模块、驱动模块、PLC模块的控制原理图,见图4、图5和图6。 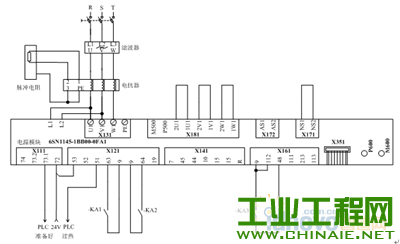 图4 电源模块控制原理图 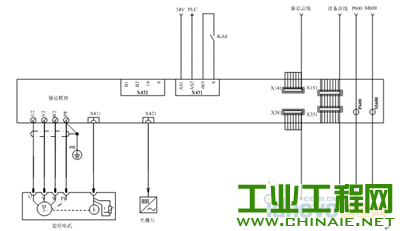 图5 驱动模块原理图 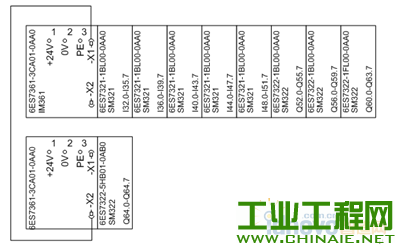 图6 PLC模块连接图 4.2控制系统屏蔽设计 为防止有用信号以外的噪声对系统产生影响,特对控制系统做了屏蔽处理。主要方法如下: (1) 用合理线径的导线电柜里强电和弱电的地线端连结到地线汇总排上; (2) 控制系统的强电端要接地,弱电部分的零也与地线相连; (3) 采用金属网将控制系统外壳连接到接地母排上,系统的接地电阻阻值不大于0.01 欧; (4) 动力电缆和控制电缆采用带屏蔽的电缆,用夹子将电机电缆和控制电缆的屏蔽层固定到安装板上; (5) 避免动力电缆与其它电缆长距离平行走线,控制电缆和动力电缆按90°角交叉。 5.结论: 本文根据机床的实际情况对数控系统、伺服驱动、PLC模块等进行了选型,对整套机床电气控制系统进行了原理设计以及硬件连接等工作。同时对西门子840D数控系统有了更深入的了解,西门子840D数控系统可进行模块化设计工作,根据样本就可以对伺服电机、伺服驱动器及其辅件进行选型和设计工作,大大节约了设计时间。 XK2852型桥式数控动梁龙门镗铣床研制成功满足了国内经济高速发展的需求,打破了国外对我国高端产品的技术封锁,实现在“高、精、尖”重大数控装备上的突破,为国家的军事、航天航空等诸多领域提供了装备保障。 |
 /2
/2 







