|
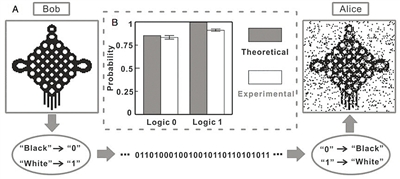
研究团队成功传输了一张100×100像素的中国结图片,传输正确率达到了87%。 第二看台 以日常生活的经验,任何信息的传输都需要通过实物载体,如信件、电磁波等,即使是当前比较“火”的量子通信,也需要量子传输。然而,国际著名量子光学专家M. SuhailZubairy小组却在4年前开了一个脑洞,提出一个与人们日常生活中形成的直观认识相悖的“反事实直接量子通信”方案,即不需要传输任何粒子,就可以将信息传递出去。听上去,是不是很匪夷所思? 出人意料的是,中国科学技术大学教授潘建伟及其同事彭承志、陈宇翱等与清华大学马雄峰合作,完成了这个“天方夜谭”式的实验,把匪夷所思变成了科学现实。实验室中的通信双方之间没有实物粒子的交换,成功传递了图像信息。论文成果以《利用量子芝诺效应实现直接反事实量子通信》为题发表在国际权威学术期刊《美国科学院院报》上。 量子芝诺效应的名字来自古希腊数学家芝诺提出的“飞矢不动”悖论。这个悖论说,一支在空中飞行的箭,其实是不动的。因为箭在每一个瞬间的时刻都应该是静止的,那么无数个静止的组合还应该是静止。这个结论在经典世界里显然是不成立的,是逻辑上的悖论。但在量子力学里,如果一个不稳定的量子系统被连续不断的观测,其状态就会被冻结为一个定态,不会随时间向其他的态演化。这即是“量子芝诺效应”。有一个很形象但并不完全准确的例子来比喻“量子芝诺效应”:一个人准备睡觉,如果旁边另一个人不断询问其是否睡着了,那么可以想象,准备睡觉的人便总也睡不着了。 量子芝诺效应是反事实量子通信的基础。反事实量子通信是指通信双方之间不需要任何量子或者经典粒子的传递即可实现量子态的传递。为了确保这一过程,通信双方之间还需要建立一条量子信道,粒子经过此信道传输的几率一直保持非常低。如果信道中检测到有粒子通过,就需要丢弃这个结果,重新建立或者发送一个新的系统。研究人员需要布置一系列嵌套的光学干涉仪,以实现这种传输方式。 理论物理学家提出的“反事实直接量子通信”的原始方案要求有无穷多个干涉仪,这在现实科学实验中显然是不可能的,这也是实验物理学家开始认为不可能实现的原因。潘建伟团队通过对原始方案的仔细分析和改进,使得反事实直接量子通信得以实现。一方面,通过使用单光子源,在较少的干涉仪数目下也可以得到完全的反事实性;另一方面,用被动筛选光子到达时间的策略替代原方案中的高速主动光开关等。研究团队实现了技术突破,使用先进的相位稳定技术,首次实现了复杂的嵌套、和串联的单光子干涉仪,并成功传输了一张100×100像素的中国结图片,传输正确率达到了87%。 相比之下,我们所了解的常规的量子通信,即量子隐形传态,或多或少仍然需要粒子的传输。量子隐形传态基于量子的纠缠特性,纠缠态的量子首先是在一起制备出来,然后分别传送到两端,它们的通信才开始。另外,虽然粒子可以在远距离实现纠缠,它们仍然需要光子在两个粒子之间传播。 而量子反事实传输是基于“光的相位”进行传输通信方式,这种通信方式之下,光强不再重要。并且由于通信双方之间没有粒子的传输,也使得窃听也变成无源之水、无本之木。因为这项技术可以利用极其微弱的光来实现成像,还能够用来对一些脆弱的文物进行成像,有利于文物的保护和研究。 这项工作是量子通信领域的全新尝试。潘建伟团队的探索,使得人们有机会更深入地理解量子力学。该工作被《美国科学院院报》的审稿人评论为 “是一个将量子芝诺效应用于通信的新奇实现”以及 “非常有趣且及时”。该工作受到了英国物理学会网站、《科学美国人》、物理学家网等国际权威媒体的专题报道。 相关链接 量子芝诺效应的物理解释 考虑一个系统,经过一次测量后得到本次测量的本征态A,测量过后,系统自由演化,可能会演化到另一本征态B,因此在下一次测量到来之前,系统处于A和B的叠加态,且系统处于B态的概率是随时间线性增加的。在大测量数目和短测量时间的限制下,系统将会被“冻结”到A态。 |
 /1
/1