|
0.引言 交流伺服系统广泛应用现代工业中,具有加工精度高、生产效率高等特点。伺服系统一般以 PID 控制方式为主。传统 PID 控制实现较为简单,且控制效果较佳,然而伺服系统存在参数时变、负载阻力扰动等问题,传统 PID较难满足实际要求[1-4],因此,采用更加有效可靠的控制方式也就尤为必要。模糊控制是一种典型的智能控制方法,它同样广泛地应用于工业生产中,如数控机床、机器人、温度控制、反应等[5-6]。模糊控制不需要依靠受控对象的数学模型,避免了烦琐的运算以及较多可能产生的误差。本文将模糊控制与 PID 相结合,将模糊 PI 应用于速度环控制器中,以此建立双闭环伺服系统。通过仿真对比,表明模糊 PI 控制较之传统 PID 控制具有更快的动态响应快、超调小以及稳态精度高。 1.伺服系统 近年来,对交流伺服系统的研究主要集中在两个方面: 控制策略、永磁同步电机。永磁同步电机控制比较适合于数控机床的加工,其主要用途在于驱动中小容量。伺服系统主要采用三环( 位置环、速度环、电流环) 控制技术,为解决系统中的电流谐波问题,常采用脉冲宽度调制技术,包括正弦波调制、空间矢量调制等。A. R. Beig 等人于 2007年提出了空间矢量脉宽调制算法,并通过与正弦波调制的对比实验,证实了空间矢量脉宽调制技术可以减少电流谐波,并能够进一步扩大逆变器功率的使用范围。本文的伺服系统采用的是 SVPWM 技术,有关 SVPWM 技术的原理已有很多文献说明[7-10],其算法流程如图 1 所示。  图 1 算法实现流程图 2.模糊控制 2. 2 模糊控制原理 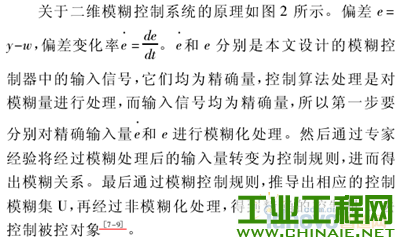 2 2. 3 模糊控制器的设计步骤 模糊控制器的设计步骤分为以下四步:(1) 确定模糊控制器输入输出变量  (2) 隶属度函数的选择 常用的隶属函数有三角函数形和正态函数型。正态函数型因计算量大,适用于对系统快速性要求较低的场合。三角隶属函数计算工作量相对少许多且精度也能达到满意的特点,因此本文选择三角隶属函数。 (3) 设计模糊控制规则 模糊控制规则是设计模糊 PI 控制器的关键,主要由专家知识和操作人员的实际操作经验得到的。当偏差较大时,控制规则应尽快消除误差为主,当偏差较小时,控制规则应以系统的稳定性为主。 (4) 论域、量化因子和比例因子的选择 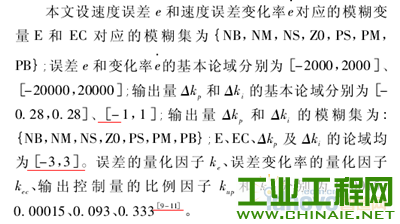 3.模糊 PI 控制器的设计 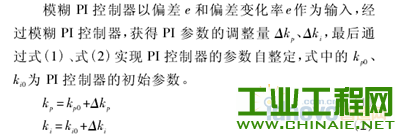 根据前人的经验,被控过程对参数 kp、ki的自整定要求如下:( 1) 当偏差 e 较大时,为了加快系统的响应速度,应取较大的 kp; 同时为了防止系统响应出现较大的超调,产生积分饱和,应对积分作用加以限制,通常取 ki= 0,去掉积分作用;  表 1 Δkp| Δki模糊控制规则表  4.仿真分析 首先,建立系统模型,如图 3 所示。 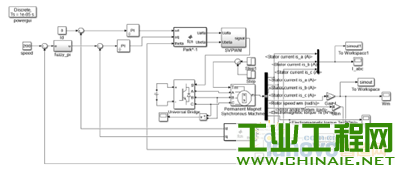 图 3 采用空间矢量脉宽调制技术的系统仿真模型 根据上述参数,建立模糊 PI 控制器仿真模型,如图 4所示。并替换掉原来的速度调节器。kp的初始值取 0. 2,ki的初始值取 6。 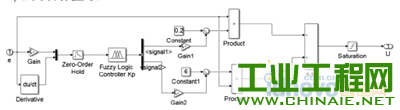 图 4 模糊 PI 控制器模型 (1) 电机以额定转矩 2Nm 起动,给定转速为 200r/min,图 5、图 6 是模糊 PI 与传统 PI 系统性能对比。与传统 PI 控制相比,模糊 PI 控制的转速调整时间有所减小,而且无超调; 转矩基本无脉动,而且转矩达到额定转矩的时间更快。因此满载起动时,模糊 PI 控制的系统性能更好,响应速度更快。 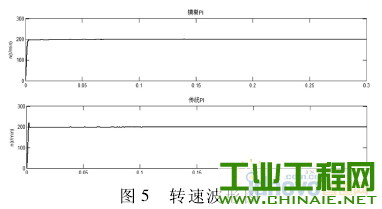 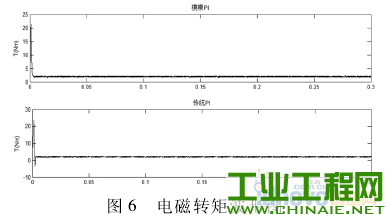 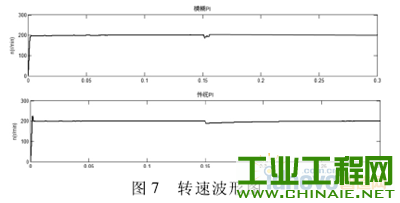 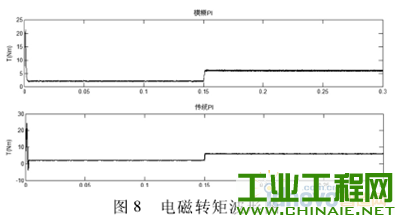 5.结束语 本文采用模糊控制对交流伺服系统的速度环控制器参数进行优化,减小了负载扰动对伺服系统的影响,提高了系统的响应速度。仿真结果表明: 基于模糊控制的双闭环伺服系统具有超调量小、响应快的伺服性能。 |
 /2
/2 







