|
随着机器人产业的发展,工业机器人作为最为重要的一个分支,近年来取得长足的进步。其中减速机是最为核心的关键技术,减速机中应用最为广泛的有谐波减速机和 RV 减速机。其中谐波减速机具有传动速比大、传动精度高等优点,但是容易产生交变应力,造成疲劳破环,散热条件差。RV 扭矩大、承受过载能力高、传动效率高,较为广泛的应用在机械臂中。 1.硬件组成
1.1 硬件系统组成 使用 PLC 作为核心控制器,PLC 通过编写的程序控制变频器实现交流电机的多端速运行,交流电机的输出转速可以通过模拟量模块进行实时的检测监控,张力控制器通过控制电流的大小调整磁粉的输出实现模拟负载的效果。同时试验台系统中的所有变量都可以通过人机界面进行监控、调整。 1.2 系统硬件的选择
1.2.1 PLC PLC 的选择主要要考虑机型、容量、I/O 模块、电源模块、特殊功能模块。 本文试验台,所需要输出点 5,输入点用触摸屏仿真处理所以输入点不做要求,同时需要需用 4 通道的模拟量模块监控交流电机的转速。综上分析 PLC 控制器选用西门子 S7- 200 系列 CPU- 22(AC/DC/RLY)。 1.2.2 人机界面 选用昆仑通泰的 MCGS 触摸屏来作为试验台的人机交互界面。利用触摸屏来控制系统的启动、停止、多端速的选择、转速曲线监控、报警数据的存储等功能。使操作更加的方便,并节省 PLC 的输入点的应用。 2.控制系统组成
2.1 PLC 内部寄存器分配及 I/ O 分布表 表 1 系统控制 I/ O 分布表 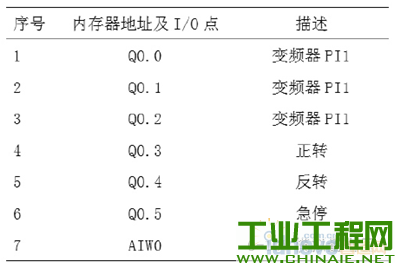 2.2 PLC 程序设计 1)将变频器的模拟量信号采集到 PLC,应用 EM232 的模拟量借口采集到模拟量信号存储到 AIW0 存储器。 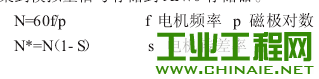 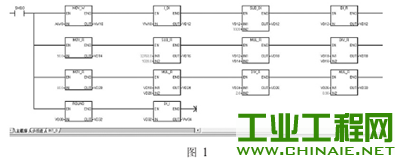 2)多段速调速方法。通过控制 Q0.0 Q0.1 Q0.2 三个输出端子的通断状态,实现变频器的 7 段调速。 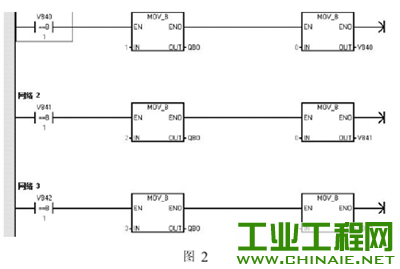 3.系统调试 操作界面主要由:数据显示、实时报警、实时曲线、数据报表、参数设定、密码设置等界面组成。实时曲线画面可以实时的反馈电机转速的信息,观察电机的速度曲线,如图 3 所示。  图 3 电机实时转速监控 4.实践与经验 本试验台中应用廉价的交流电机替代了昂贵的伺服电机,应用PLC 控制器替代了工业机器人的核心控制器,利用张力控制器模拟负载,真实的模拟了机械臂工作情况。为检测 RV 减速机的生产质量以及研究 RV 减速的工作性能提供了有力的辅助工具。 |
 /2
/2 







