|
0 引言 工业机械手按驱动方式可分为电机驱动、机构驱动、液压驱动、气压驱动等。电机驱动机械手运动速度快,抓力大,但存在速度难以控制的不足;液压驱动抓力较大,但速度慢;而气压则速度较快,抓力小。 机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。液压机械手具有快速、高效等优点。该机械手采用液压驱动,控制手臂的伸缩、手腕的回转和手部的抓放运动,上下运动由电机控制。 机械手按其机构工作原理可分为平行机构、摆动机构、旋转机构、多点式机构、关节式机构等,目前工业上使用的机械手多采用复合型机构。作者介绍了一款采用液压驱动式的工业机械手,针对机械手伸、抓、缩、放四大动作分别对其进行液压回路设计、模拟仿真 、PLC 动作控制、机电液一体化模拟实验。 随着机械手技术的发展,加上PLC控制技术及电机控制技术的应用,适用于工业自动化生产的通用机械手得到了广泛的应用。由于气动机械手结构简单、控制方便、定位准确,因此在自动化生产线上得到了广泛应用。本文将介绍一种采用PLC与步进电机控制的气动搬运机械手。 1气动机械手的工作原理 工业气缸驱动式机械手结构示意图如图 1 所示,该结构的特点是采用气动缸驱动,集平行机构与单边摆动机构于一体。为了克服气压驱动的不足,快进过程采用差动回路,工作 过程采用同步回路与调压回路。气缸动作顺序图如图2所示。
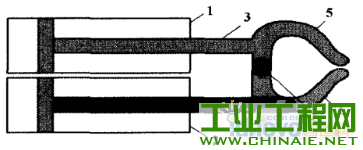 图 1 机械手结构示意图 1、2-气缸,3-平行机构,4-铰链,5-固定爪,6-活动爪
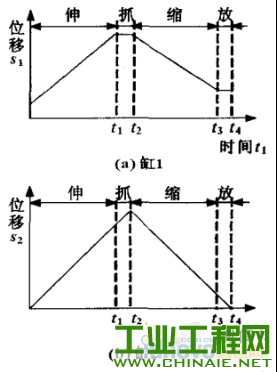 图 2 气缸动作顺序图 功能实现 : 伸。缸 1、缸 2同 时向右运动,油路采用差动回路与同步回路; 抓。缸 1停止工作,缸2向右运动,回路采用调压回路。 缩。与伸出动作相反。 放。与抓取动作相反。 在初始位置时,机械手张开一定角度,即缸 2的初始角度为0,气缸1有一定的偏移角度。气动机械手的气动原理如图3所示。
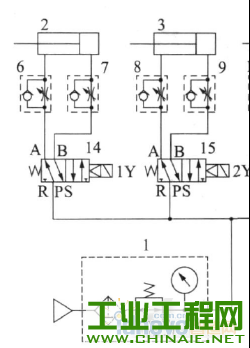 图 3气动机械手的气动原理图 该气动机械手工作过程为:当工件推入存放料台后,气动机械手手臂前伸--前臂下降--气动手指夹紧工件--前臂上升--手臂缩回--手臂右旋到位--手臂前伸--前臂下降--手爪松开将工件放入料口--前臂上升--手臂缩回--机械手左旋返回原位,等待下一个工件到位,然后重复上面的动作。 气动机械手的左/右旋转主要靠步进电机驱动实现,本系统选用了三相混合式步进电机及细分型步进电机驱动器作为机械手旋转运动的驱动装置和定位装置。为了机械手定位需要,在机械手底座装有电感传感器作为机械手的基准传感器,并在机械手左/右旋转的极限位置装有限位开关。 2 PLC控制器
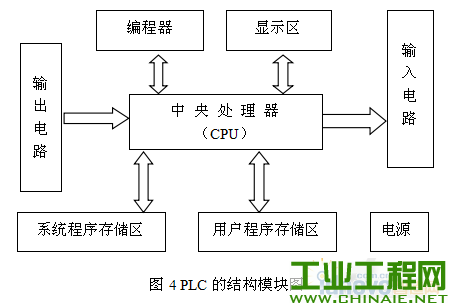 PLC是控制系统的核心器件,它相当于人的大脑,控制我们一切的动作。它的结构一般是由中央处理器、电源部件,输入、输出部分构成。图4为一般PLC的结构模块图。PLC的软件简单易学、使用维护方便;集电控、电传、电仪于一体;可靠性高、抗干扰能力强;PLC网络的性能价格比高,以至成为现代工业自动化三大支柱之首。现在世界上比较出名的PLC公司有日本的三菱、松下,美国的A-B以及德国的西门子等,每一个公司的产品都有它的独特之处。 该系统可编程控制器件采用的是西门子公司的300系列PLC,具体型号为315-2PN/DP(如图3所示),315-2PN/DP性能参数及模块参数如下表1所示: 表1 西门子315-2PN/DP及模块性能参数
3 PLC动作控制与仿真 采用德国西门子S7-300编程操作面版进行PLC梯形图编程。I0.0为电源开关,I0.1为缸 2行程开关,I0.4为缸1行程开关,I0.2为缸2限位开关,I0.3 为缸 1限位开关,M 0.0 、M 0.1为中间继电器,QO.1、Q0.2为电磁阀YA1、YA2,Q0.3、Q0.4为电磁阀Y B1、YB2,Q0.5、Q0.6 为电磁阀YC1、YD2。当电源开关I0.0接通,中间继电器M0.0自锁,QO.1、Q0.3 同时得电,实现机械手同步伸动作;当固定爪接触到物体,行程开关I0.4常闭触点断开,Q0.1失电,缸1停止,缸2继续运动;当活动爪抓牢物体,行程开关I0.1常闭触点断开,常开触点闭合,Q0.1、Q0.3失电,Q0.2、Q0.4、Q0.5、Q0.6 得电,缸1、缸2 同时缩回;当缸1到达指达初始位置,限位开关I0.3常闭触点断开,缸1停止,缸2 继续运动放开物体;当缸2 到达指达初始位置,限位开关I0.2常闭触点断开,完成一个循环过程。梯 形图中中间继电器M0.0、M0.1实现互锁。 按图 3 液压气路在西门子液压 PLC 控制实验台上完成液压回路接线,采用STEP 7 对S7-300进行编程 ,实验仿真结果如图5所示。
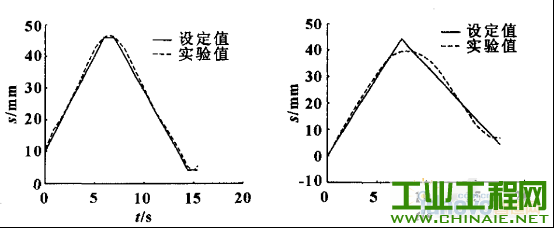 A 气缸1 B气缸2 图5 仿真结果 4 结论 针对机械手伸 、抓 、缩 、放 四个动作分别对其进行了液压回路设计 、仿真 、PLC 编程,采用PLC与气缸控制的气动搬运机械手原理简单、性能可靠。并在西门子300系列型PLC控制液压实验台上进行了模拟仿真;经实验仿真证明,该机械手控制方便、定位准确。实际应用中可也根据需要修改机械手动作流程,具有很高的实用价值。 | |||||||||||||||||||||||||||||||||||||||||||||

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20


 /1
/1 


