|
目前世界高端工业机械手均有高精化、高速化、多轴化、轻量化的发展趋势。 更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。 国内机械手主要用于机床加工、铸锻、热处理等方面,以减轻劳动强度,改善作业条件。 随着社会生产不断进步和人们生活节奏的不断加快,机械手在工业制造、医学治疗、娱乐服务、军事以及太空探索等领域都能得到广泛的运用。 可编程序控制器(PLC)是工业控制中应用最广泛最可靠的控制器。 本项目通过对机械手的组装和 PLC 系统的编程,实现多轴机械手可靠稳定的搬运工件。通过本项目的研制,研制人员提高了自主动手能力,掌握机电一体化综合设计技能,学习和掌握 PLC 语言的编写,且借此可以了解学习国内外机械手的发展水平。 1 总体部分 如图 1 所示,本项目研制的机械手教学实训设备的总体结构由机械部分和电气部分组成。
 图 1 PLC 多轴机械手总体结构图 1.1 机械部分 机械手的机械部分总体结构由夹持部分、传动机构和旋转机构所组成。 (1)夹持部分使用机械夹手与真空吸盘相结合的结构夹持工件,可根据被夹持工件的形状和大小配备多种形状和尺寸的夹头和真空吸盘,以适应操作。 真空吸盘一般用橡胶制造,主要作用是将工件吸合便于搬运,最大限度的保护工件的外观,还具有易使用、零污染等优点;(2)传动机构由 XY 轴滚珠丝杠副组成,滚珠丝杠副传递力矩,完成工件在 XY 轴方向上的往复运动,其利用滚珠运动的原理可以具有较高的重复精度,实现运动的微进给,从而保证更准确的将运送工件至指定地点;(3)旋转机构 Z 轴由底座和机械手所组成,旋转机构扩大了机械手的动作范围,提高了机械手在搬运过程中的灵活性。 1.2 电气部分 PLC 控制多轴机械手电气部分主要由变压器,步进电机驱动器,直流电机驱动器,PLC 主机模块,控制面板等部分组成。 (1)变压器作用是把 220V 的交流电压转换为电机与 PLC 工作的 24V 直流电压;(2)X 轴 Y 轴直线运动由步进电机实现,步进电机能够达到比较高的重复定位精度。 步进电机驱动器将输入的电信号(或者脉冲信号)通过模数处理,转变为电机的步进运动与增量位移,控制机械运动;(3)机械手有两个旋转动作,分别是抓手轴的正反旋转和旋转底盘 Z 轴的正反旋转,其动作由直流无刷电机带动,可回旋 360°,无刷直流电机的驱动器采用 24V 直流供电,有起停及转向控制、过流、过压及堵转保护等特点;(4)控制面板开关主要分为自动和手动两种模式。 自动模式下,根据 PLC 的编程顺序进行各种动作并循环;手动模式主要是实现点动。 且控制面板上采用复合开关按钮,节约 PLC 输入点位;(5)PLC 采用了逐步通电、同步断电的步进式控制设计,受控对象之间形成互锁,动作的是否执行取决于前一步动作是否完成,若前一步未完成,则后一步无法执行。 具有编程简单、维修方便、柔性化强等特点,可在现场修改和调试程序,可根据生产要求随时改变。 2 控制要求
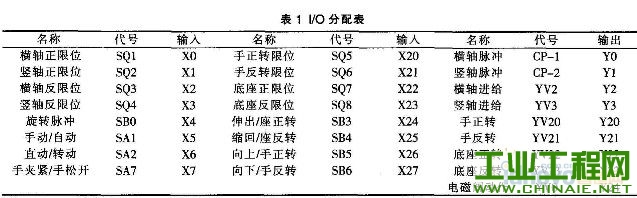
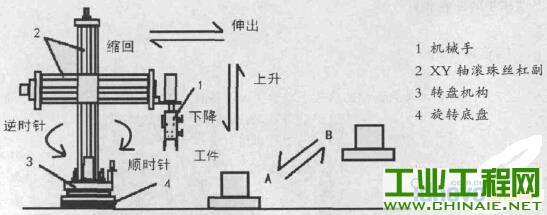 图 2 机械手动作示意图 图 2 为本机械手教学实训模型的动作示意图,其工作路径是将工件从 A 点搬运至 B 点。 机械手运行时,机械手首先要返回至设定的原点位置,之后通过 XY 轴的滚珠丝杠、底座和腕部的旋转运动至工件所在位置并夹持工件回到原点,然后将工件准确的运送至指定位置。 3 控制部分设计 基于控制要求,合理地分配 PLC 输入、输出点位。 如表 1 所示为 PLC 的输入输出各点位的分配。 表 1 I/O 分配表
 先将机械手进行复位操作。 当机械手未到原位,此时 PLC 输入电平信号跟脉冲信号 CP-1 给步进电机横轴驱动器,连接横轴的步进电机反转,横轴往后缩,后缩到位后会碰到后限位开关 SQ3,SQ3 启动之后,主机就输入电平信号跟脉冲信号 CP-2 给竖轴驱动器,竖轴步进电机控制竖轴上升,上升到位后会触碰到竖轴反限位开关 SQ4,SQ4 启动之后,主机输入旋转脉冲信号 SB-0 给直流电机驱动器 3,4,完成机械手的复位动作即 YU21 和 YU22 的动作。 复位操作结束后,主机输入脉冲信号 CP-1 给横轴驱动器,步进电机开始正转,横轴实现进给操作 YV2,横轴进给到位时碰到正限位开关 SQ1,进给完成。 机械手收到主机发送电压信号,旋转至已定的角度,完成动作 YV20,这时气动电磁阀断电,机械手张开。主机再同时输入电平信号跟脉冲信号 CP-2 给竖轴驱动器使步进电机开始反转,竖轴下降。当竖轴下降至碰到限位开关时 SQ4,下降停止,电磁阀得电机械手夹紧。 夹紧后,主机只输入脉冲信号 CP-2 给竖轴步进电机驱动器,步进电机得电正转竖轴上升,碰到限位开关 SQ2 后,上升停止,启动横轴步进电机驱动器脉冲 CP-1,步进电机得电开始反转,横轴缩回。 碰到限位开关 SQ3 后,PLC 发送旋转脉冲信号 SB0给底盘,底盘正旋转到位。此时主机再次输入脉冲信号 CP-1 给横轴驱动器,横轴第二次向前伸出,碰到限位开关 SQ1 后停止。 停止后主机输入电平和脉冲信号 CP-2 给竖轴驱动器 2 使得竖轴电机 2 反转使竖轴再次下降,下降到位碰到竖轴正限位开关 SQ2 停止,此时电磁阀断电,卡爪和真空吸盘放松,释放工件,完成整套的工件运送工作。本机械手实训装置采用的 PLC 具有高速运算能力和 PID 调节功能,同时可以输出两路脉冲控制两台电机的优点。 图 3 为控制输出两路脉冲梯形图,可以控制两个方向的电机同时运动,节省搬运时间。
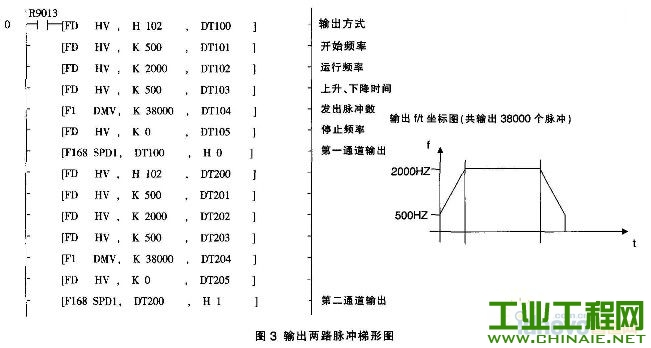 图 3 输出两路脉冲梯形图 4 结语 本项目研制的机械手系统稳定、使用方便、成本低,具有可编程、二次设计等开放式功能特点,对提高学生的创新能力和综合实践能力有显著效果。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

