|
一、引言 PLC作为一种可编程控制器,能够在给定程序下,以PLC作为控制核心来实现逻辑运算、顺序运算、计时、计数和算术运算等操作。机械手是典型的多运动部件组合体,其作为一种受控机构,可在外部输入信号的控制下完成指定的动作。应用PLC控制机械手实现各种规定的工序动作,可以简化控制线路,节省成本,提高生产效率,减轻操作者的劳动强度,实现安全生产。 本文以运用PLC实施机械手的控制展开研究,目标是实现将工件从一个工作台运送到另一个工作台的手动、自动双模式控制,要求在出现错误动作时能够实现手动操作使机械手恢复到一个较初始的状态。 二、机械手运送控制的动作流程 机械手的基本结构如图1所示,主要由驱动机构和传动机构两部分组成,其中驱动机构的驱动信号由外部输入。 要实现将工件由一个工作台搬运到另一个工作台,机械手应控制的动作流程包括:
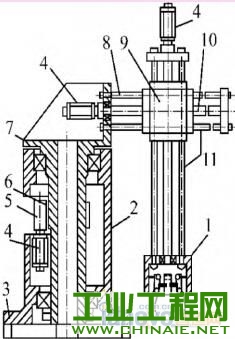 图1机械手结构图 1.夹持机构2.立柱3.机座4.步进电机5.主动机构6.从动机 构7.摇臂8.导向轴9.滑块10.丝杠轴11.机械手臂 1)如图2所示,自动模式控制时,只需要一次启动,便可实现周期性自动动作。开始运行后,如果机械手不在初始位置上,机械手将自动回到原点。归位后,纵轴下移,移动到下限位,手爪抓取工件,为保证抓牢,抓取动作延时2S,然后纵轴上升,到达上限位后横轴自动向右伸出到右限位,然后纵轴下降到下限位,手爪张开,放下物件,延时2S后,纵轴上升,然后横轴左移,回到原点,准备进行下一周期运转。
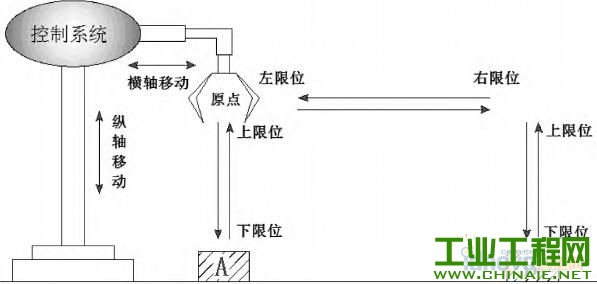 图2机械手自动模式工作流程图 说明:(1)机械手的工作要求是将工件从A点移到B点; (2)原点位置时机械夹持装置处于夹紧状态,位于左上角; (3)机械夹持装置设计为有电放松,断电夹紧。 2)手动模式控制时,要求机械手手臂上、下移动,左、右移动,夹紧、放松每个动作可以独立操作。 三、机械手的PLC控制原理 在生产过程中,为了实现实时监测,需要在各个监测点安装监测元件,比如常用的光电元件、电偶元件以及各种传感器。同时,为实现自动控制,提高机械智能化,需采用多组限位开关,将各个开关量作为PLC的输入信号,在PLC内部通过对所检测到的输入信号进行运算,然后再输出相应的控制信号驱动对应的步进电机,进而通过执行机构驱动机械手做出相应的动作。通过设置限位开关既可实现动作到位的检查、便于动作转换的控制,同时也可保证机械手能在安全范围内运行。 为了实现自动化下的手动控制,应将机械手做出各个动作时所需要的输入信号在外部用独立的按钮连接起来,但是,这些外部独立的开关量又必须和限位开关的开关量结合起来,正是这种联结,才能保证机械手在手动模式下不会因为操作者的人为误差而错位动作,甚至因为超程而造成机械损坏。 四、机械手双控模式的运送系统设计 本设计中,机械手的控制设有自动、手动两种工作方式,其中自动模式为周期性运动,手动模式则为单步、点动。在自动模式下,需要机械手在原点位,即图2中所示的左限位和上限位,且机械手爪不处于工作状态,若开始不在原点位,则自动回到原点位或者选择手动模式将机械手回到原点位。表1是用三菱系列PLC控制机械手时需分配设置的输入输出信号端口的设计。 表 1 PLC 的输入 / 输出信号端口分配
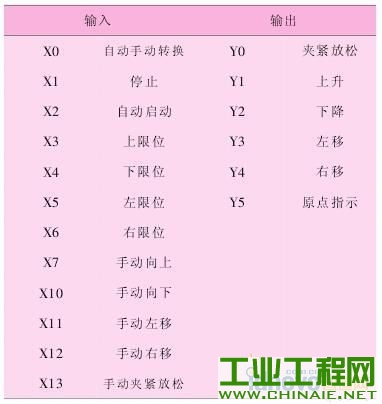
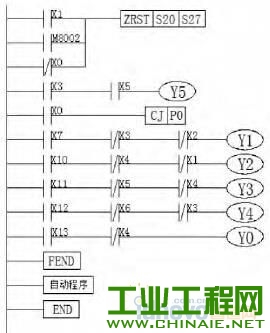 图3机械手手动模式程序 图3所示为手动模式的PLC程序设计,在此进行了开关互锁以保护机械部分的设计。如常开X7与常闭X3和常闭X2串联驱动Y1,按表1设置的输入/输出端口分配,其设计是在选择自动模式(X2)时或者机械手已经达到上限位位置(X3)时,不能进行手动向上(X7)的上移(Y1)操作;又如常开X11与常闭X5和常闭X4串联驱动Y3,则表示当机械手处于下限位或者左限位时不能进行手动左移操作。 图4所示为自动模式下PLC程序步进图,从程序结构上能清晰看出机械手将自动按下降(Y2)→夹紧(Y0)→上升(Y1)→右移(Y4)→…的步骤顺序和各步之间的跳转条件。总体程序是将自动模式嵌套在手动模式下的设计,由此能较好地实现手动、自动一键转换,并且有利于研究从整体上分析PLC如何实施机械手的控制。
 图 4 机械手自动模式步进图 五、结语 采用可编程控制器PLC对机械手进行控制,能对输入信号处理迅速,可实现系统的稳定可靠运行,而且还可以根据控制要求,对PLC的输入/输出功能进行扩展。通过PLC自身对输入信号的拾取及处理,更容易实现较复杂多模块系统的智能化控制。在人力成本渐次提升的压力下,很多企业都希望通过大量采用机械手代替人工以降低成本,因此,对PLC控制机械手的研究具有非常积极的意义。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

