|
随着当今世界科学技术的飞速发展,数控加工技术广泛应用制造业中。对于加工形状简单、计算量不大、程序段较少的零件,采用手工编程比较合适。但对于几何形状复杂的零件,由于编程计算量大,容易出错,有时甚至无法编出程序,因此采用自动编程的方法编制程序。编程的软件较多,CAXA制造工程师(简称CAXA-ME)有易学好用的特点,它可以对复杂零件造型,自动生成加工轨迹和G代码(NC程序)。并能够进行轨迹仿真操作和轨迹的编辑、修改。对于需要在四轴数控机床上加工的部分,将其G代码导入VERICUT中,且仿真验证,就能够有效地避免刀具与机床、工件、夹具等干涉、碰撞或过切问题。CAXA-ME和VERICUT软件结合使用,为复杂零件的数控加工方案和生产提供了可行性和安全性。本文选取图1所示的典型复杂零件,该零件需要进行轮廓粗精加工、铣球面、在圆柱面上铣凹槽、凸台、钻孔、攻螺纹等多个工步。
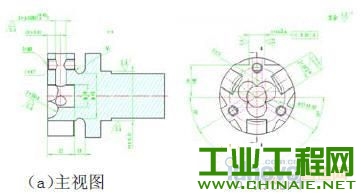 图1 复杂零件 1 基于CAXA-ME的零件的实体造型 分析图1零件,主要绘制三个球面,圆柱面凹槽、孔等。绘制方法主要通过拉伸增料、除料、环形阵列等工具,特别是阵列用的较多,这里强调的是先绘制旋转轴,选择环形阵列图标,选取两个拉伸除料的特征,拾取旋转轴,旋转角度为120°,旋转个数为3个。复杂零件造型如图2所示。
 图2 零件造型 2 自动生成加工轨迹 零件造型后,即可利用CAXA-ME系统提供的多种形式的走刀路线生成的功能进行数控编程。CAXA制造工程师中提供了十余种走刀路线牛成的方法。用户可以根据所要加工工件的形状特点、不同的工艺要求和精度要求,灵活地选用系统中提供的各种加工方式和加工参数等,方便快速地生成所需要刀具的切削路径。 2.1 平面区域加工 针对粗精加工,加工方法较多,主要选择平面区域粗、精加工。平面区域精加工跟平面区域粗加工的操作步骤一样,只是修改合适的切削参数。以平面区域加工为例,分析其走刀路线形成过程: (1)单击实体边界图标,拾取要加工的表面。 (2)建立坐标系,点击创建坐标系按钮,,拾取图形上的三个点,坐标系名为g,单击确定,即创建了一个新的坐标系。 (3)点击工具栏的“加工”>常用加工>平面区域粗加工>弹出“平面区域粗加工”中对话框,设置各参数,如修改里面的顶层高度为0,底层高度为25,选用中8的立铣刀,单击确定按钮。然后左键拾取轮廓曲线,选择方向,右键确定。圆柱凹槽走刀路线如图3所示。
 图3 圆柱凹槽的走刀路线 2.2 等高线精加工 对于球面,采用等高线精加工。该加工用于大部分直壁或斜度不大的侧壁加工。如果限定高度直,只作一层加工,可以进行局部等高加工、清角加工。 (1)单击实体表面图标:,左键选取三个曲面,右键确定。 (2)点击工具栏的“加工”>常用加工>等高线精加工。左键选取曲面轮廓,右键单击确定,走刀路线如图4所示:
 图4 等高线加工走刀路线 3 仿真 以平面区域的加工仿真为例,简述其仿真过程。(1)点击实相贯线图标,打开对话框后选择实体边界,选取毛坯下表面的最大直径。 (2)在轨迹管理中选取图标,右键点击,选择定义毛坯,弹出定义毛坯对话框。 (3)在对话框里面选择典型为柱面,高度为50,拾取平面轮廓为圆柱下表面所选的,选择方向,然后点击确定。 (4)选择平面区域粗加工,点击右键,弹出一个对话框,选择仿真部分,单击确定。 (5)点击运行图标,进行实体仿真。 同样可进行等高线的加工仿真,如图5所示。
 图5 等高线仿真 4 后置处理 后置处理就是特定机床把系统生成的二轴或三坐标刀具轨迹转化成机床能够识别的G代码指令,生成的G代码可以直接输入数控机床用于加工。 在“后置处理”模块子菜单区中选取“生成G代码”,选择正确的FANUC数控系统,分别拾取零件的球面、圆底槽、曲面、孔等刀具路径,鼠标右键结束拾取,系统即生成数控程序。 5 VERTCUT 7.1.5仿真加工及加工中心加工 分析该零件,对于圆柱面的加工需要四轴机床,则使用VERTCUT软件进一步仿真验证。选择与实际系统同样的机床,构建旋转轴A轴,建立四坐标立式加工中心。 5.1 设置工作目录 打开“文件”>工作目录>选择文件夹。 5.2 新建项目 打开“新建项目”,选择“毫米”。 5.3 构建机床,调用控制系统 (1)控制系统fanuc Oi; (2)在training中调用baslc-3axes-vmill; (3)构建第4轴及三爪卡盘; (4)在完成了机床建模、添加刀具、工装、毛坯、设置程序零件后将NC程序导入构建的四坐标加工中心,进行模拟加工,如图6所示为圆柱表面粗铣凹槽仿真。
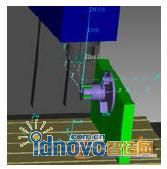 图6 粗铣凹槽仿真 5.4 成品加工 用VERTCUT 7.1.0进行仿真加工,确定了各零部件之间与工装、刀具和刀柄没有发生干涉与碰撞,将优化的NC程序通过CAXA-ME软件传输到立式加工中心,准备加工实体。在桌面打开CAXADNC2011_DNC,选择发送文件,找到NC程序后,点击打开,此时加工中心通过串口进行接收。等接收完牛后,进行零件的对刀,加工,成品如图7所示。
 图7 成品 6 结论 利用CAXA-ME软件对于复杂零件进行自动编程、仿真,速度快、效率高。对于需用四轴或四轴以上加工的部分再用VERICUT仿真验证、优化,就能够有效地检测加工过程中可能存在的各种问题。利用CAXA-ME和VERICUT软件对复杂零件进行编程和仿真,为数控加工方案和生产提供了可行性和安全性,大大地提高了生产效率。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

