|
2D通用机械手是一种可实现智能定位、模拟真人操作、重新编程,并能进行2D平面作业的机电设备。由于工业技术的飞速发展。自动化程度的不断提升,在工业生产现场,对于重复生产工序可采用机械手作业来完成,不但降低了人力成本,提高了生产效率,而且在一些较为危险的作业环境中,可减少不必要的人身伤害。 本文根据2D通用机械手的设计要求,设计了具有4自由度的2D通用机械手,并给出了主要的PLC控制程序。机械手实现了在2D空间内的稳定运行。 1 设计要求 机械手的设计要求为:在启动机械手作业系统之后,首先需对其进行初始化,初始化内容包括三部分131:手爪、手指需处于最大张开位置;手臂缩回回位;手臂回位。值得注意的是,为了加快初始化过程,初始化的三部分需同步进行。机械手的作业过程,可分为5个步骤: (1)在机械手启动以后,控制系统根据工件的坐标位置,解算出驱动手臂伸缩的步进电机、驱动躯干旋转的步进电机的运动步数,旋转与伸缩过程同步执行,机械手手指运动到工件上方5 cm位置停止; (2)位于机械手手掌的红外传感器检测出待加工工件; (3)PLC驱动机械手手指作收紧动作。待手指检测到待加工工件后,停止收紧动作并延时1 s,然后工件竖直向上移动5 cm; (4)根据工件实际位置与目标位置,计算电机行进步数,并将工件放置于目标位置; (5)延时1 S,机械手手指逐渐张开,最后工件释放。 当作业过程完成后,进入下一个循环。 2 设计方案 该2D通用机械手具有4自由度,分别为:手臂的前后伸缩,手臂竖直移动,躯干的水平旋转,手指张开、收紧。根据设计要求,可简化为:手指夹紧,手臂伸缩,躯干旋转。 2.1 手指夹紧 该机械手手指在本质上为1只移动卡具,但要求机械手手指具有合适的夹紧力,其夹紧精确度以及速度均要符合夹紧工序要求IS]。本文所设计的夹紧装置,由PLC驱动手指实现张开与收紧动作,在手掌与手指上,均配置有红外传感器,用于检测工件位置。 2.2 手臂伸缩 手臂是用于连接机械手手指与躯干的关键环节。本文所设计的机械手手臂,可完成伸缩与竖向移动两个动作。在伸缩与竖向移动过程中,控制系统需要根据工件坐标,计算电机的行进步数,从而由步进电机驱动丝杆,实现机械手臂的伸缩与竖向移动。这里采用了丝杠+螺母的传动机构,其工作稳定、精确。 2.3 躯干旋转 躯干作为该2D通用机械手的支撑装置,可以实现自转,并带动机械手上其他机构在水平面内旋转。在驱动躯干旋转的步进电机上,安装有1只光电旋转编码器,其每转动lo,发送出3个脉冲,由PLC采集光电旋转编码器所发送出的脉冲数,并转化为躯干所转动角度。在躯干上,配置有旋转限位开关,其最大转动角不会大于180°。 3 控制系统 系统采用MITSUBISHI公司的FXlN系列PLC,其中,输入继电器点位:36,输出继电器点位:24。该机械手的PLC控制程序可划分为四部分:主程序,自动控制模式程序,手动控制模式程序,初始化程序。这里着重介绍前面3部分。 3.1主程序 系统主程序流程如图1所示。当继电器Y006复位、上限位X017得电、后限位X021得电时,继电器M0置ON。这时机械手位于初始位置。若操作人员启动PLC控制程序,M8002置ON,无论PLC控制系统处于“手动”(X000置ON)或者“回原位”(X001置ON),系统均可进入初始化程序(M10置ON),做好“连续工作”准备。若M0置OFF,则M10复位(置OFF),PLC控制系统将不能进人“连续工作”模式。
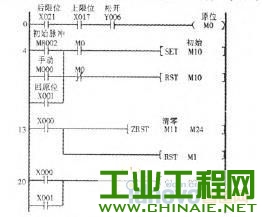 图1 系统主程序 3.2自动控制模式程序 自动控制模式的PLC程序如图2所示。当机械手位于初始位置时,按下X004按钮启动自动控制程序,系统状态切换至S1,PLC控制机械臂前伸(Y003得电),待前限位开关得电(x020置oN)时,系统状态切换至s2,此时S1复位。PLC控制机械手顺时针旋转(Y007得电,X024置ON),系统状态切换至S3,PLC控制机械臂下降(V002得电,X016置ON)。系统状态切换至S4,PLC控制Y006得电,并延时l s,从而使机械手指具有足够的夹紧力。当定时器定时时间到,系统状态切换至S5,PLC启动机械臂上升,当机械臂到最大高度,X017置ON,系统状态切换至S6。PLC控制机械臂收缩,当收缩到后限位位置,系统状态切换至s7(底逆转动作)。接着系统状态切换至S8,X020置ON,系统状态切换至S9,机械臂下降。当机械臂下降到“下限位”位置时,X016置ON,机械手指张开,系统状态切换至S10。为了确保机械手指完全张开,需延时1 s。待定时器T1定时时间到,系统状态切换至S11,机械臂上升。当机械臂上升到“上限位”位置时,X025置ON,系统状态切换至S13,机械臂缩回。当机械臂缩回到后限位位置时,X021置ON,系统状态切换至S14,躯干旋转,X021置ON,机械手回到初始位置,第二次循环准备。
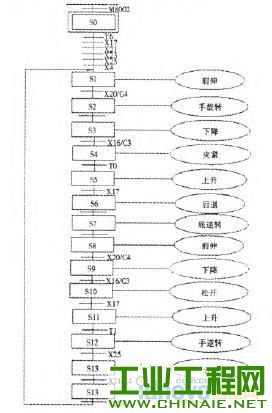 图2自动控制模式 3.3 手动控制模式程序 手动按下PLC控制系统操作面板上的各个功能按钮,机械手将进行与之对应的动作。在手动操作模式中,每一个机械手动作均考虑了机械自锁或者程序自锁,用于防止单步操作过程中出现危险操作。这里给出了手动控制模式的部分程序,如图3所示。
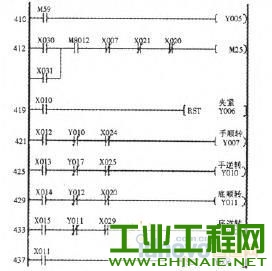 图3 手动控制模式 4 结束语 本文所设计的控制系统,可实现2D通用机械手的手动与自动模式控制,机械手可在2D空间内,稳定运行。系统采用MITSUBISHI公司的FXlN系列PLC来实现机械手的运动控制,借助于“软接线”技术完成PLC程序控制,控制系统可靠性高,具有一定的灵活性。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20


 /1
/1 


