|
1引言 简易机械手在各类全自动和半自动生产线上应用得十分广泛,主要用于零部件或成品在固定位置之间的移动,替代人工作业,实现生产的自动化控制。本设计中的机械手采用上下升降加平面转动式结构,各动作由plc控制电磁阀驱动气动执行元件完成,能十分方便的嵌入到各类工业生产线中。图1为机械手移动物品示意图。
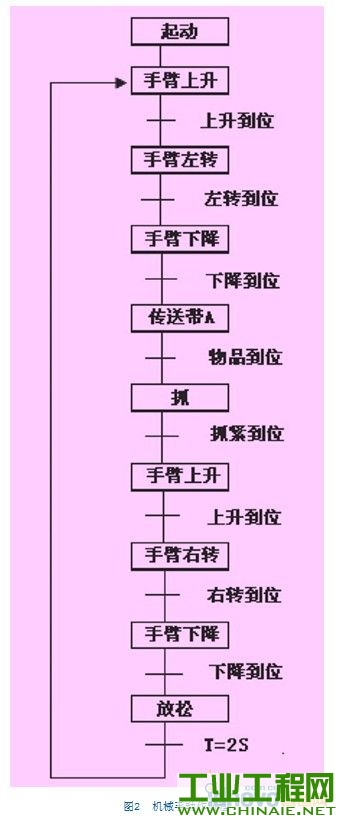
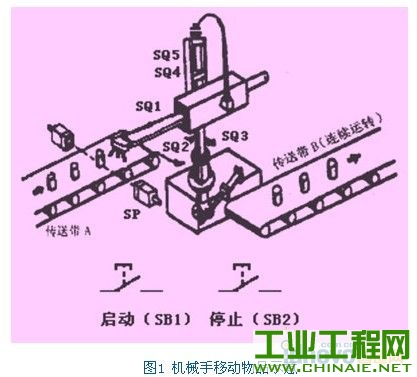 2 功能与动作流程设计 2.1功能设计 图1中机械手的任务是将传送带a上的物品搬运到传送带b。为使机械手动作准确,在机械手的极限位置安装了限位开关sq1、sq2、sq3、sq4、sq5,对机械手分别进行抓紧、左转、右转、上升、下降动作的限位,并发出动作到位的输入信号。机械手的起、停由sb1(启动)、sb2(停止)按钮控制。 传送带a、b由电动机拖动。传送带a上装有光电开关sp,检测到物品,传送带a停止。传送带b连续运转,将物品送至后工序,不需要用plc控制。机械手的上、下、左、右、抓紧、放松等动作由气动元件(气缸)执行,由六个相应的电磁阀驱动,统一由plc控制。 2.2动作流程设计 机械手及传送带a顺序动作的要求是: (1)按下起动按钮sb1时,机械手系统工作。首先上升电磁阀通电,手臂上升,至上升限位开关动作; (2)左转电磁阀通电,手臂左转,至左转限位开关动作; (3)下降电磁阀通电,手臂下降,至下降限位开关动作; (4)启动传送带a运行,由光电开关sp检测传送带a上有无物品送来,若检测到物品,则抓紧电磁阀通电,机械手抓紧,至抓紧限位开关动作; (5)手臂再次上升,至上升限位开关再次动作; (6)右转电磁阀通电,手臂右转,至右转限位开关动作; (7)手臂再次下降,至下降限位开关再次动作; (8)放松电磁阀通电,机械手松开手爪,经延时2秒后,完成一次搬运任务,然后重复循环以上过程。 3动作时序设计 根据对机械手的顺序动作要求可作出如下所示的机械手动作流程图参见图2。流程设计使用iec61131-3标准顺序功能图sfc语言描述。
 4 plc硬件设计 4.1 plc的选型 根据系统的设计要求,选用omron公司生产的cpm1a-20cdr-a小型机。该机体积小,功能强、配有标准通讯接口便于计算机对plc进行监控和管理。使用cqm1-pro01手持式编程器可以方便的在生产现场进行维护和监控。该机输入点为12,输出点为8。 4.2 i/o点编号分配 根据机械手动作流程图,可以确定电气控制系统的i/o点分配,如附表所示。
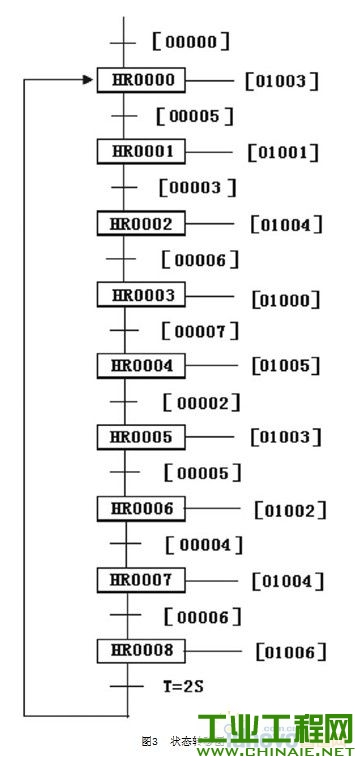
 5 plc软件设计 5.1 编制控制状态转移图 根据流程图和i/o分配表,可以编制出状态转移图如图3所示。
 5.2 程序设计及程序运行 (1)用步进指令编程。根据状态转移图及动作要领,编制的步进梯形图程序如图4所示。
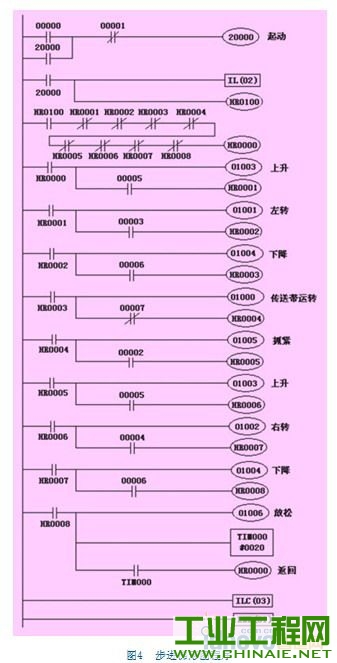 其中,在状态由hr0100转移至hr0000的条件中,增加了保持继电器的常闭触点,其作用是:当机械手工作在某一中间工步时,若plc断电或停止运行,机械手停止在中间工步上。plc复电或重新投入运行后,由于保持继电器hr具有状态断电保护的功能,因此在重新起动时,其中有某一个是断开的,使得hr0000不能置位,机械手只能从停止前被置位的保持继电器的后续工步继续动作。 (2)程序运行调试。按下起动按钮sb1,输入点00000为on,则作为自锁条件的辅助继电器20000保持为on,分支指令il接通,il与ilc之间的线圈正常工作。开始常闭触点都为on,保持继电器hr0000接通,输出点01003使上升电磁阀得电,手臂上升。当手臂上升到位时,上升限位开关使输入点00005闭合,保持继电器hr0001接通,hr0000复位,上升停止,同时,输出点01001使左转电磁阀得电,手臂左转。以后每当一步动作到位,限位条件满足时,状态转移,进行下一工步动作。当状态转移到hr0008为on时,输出点01006使放松电磁阀得电,机械手放松,同时定时器tim000计时。当计时2秒到(时间可视具体情况调整),状态又转移到hr0000,程序又重新从第一工步开始循环。停止时,按下停止按钮sb2,00001断开,辅助继电器20000为off,自锁指令断开,全部输出被禁止,但各保持继电器的状态是断电保护的,机械手停在现行的工步上。当重新按起动按钮时,辅助继电器20000为on,停止前的输出被恢复,机械手继续在停止前某保持继电器为on的工步动作。 6结束语 本设计提出了一个通用的设计方案,介绍了日本omron公司生产的cpm1a系列小型多功能plc在机械手步进控制中的设计应用。包括说明了机械手的动作原理,设计要求,程序设计方法。在实际具体应用中,还可以很方便的通过标准接口与计算机组成plc工业局域网,实现网络通信与网络实时控制。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

