|
在流水生产线中,采用由PLC控制的搬运机械手,可以将工人从重复和繁重的劳动中解放出来,实现了生产的机械化和自动化,而且可以代替人工在恶劣环境下工作。而利用工控组态软件可以实现远程控制,从可视画面中监控现场机械手的工作状态,实现自动化过程控制。 1 控制要求 监控系统要求通过画面实时显示机械手现场工作状态。搬运机械手现场的工作是不断将工件由一处传送到另一处。机械手有上升、下降、左移、右移和夹紧/放松几个动作,其中上升、下降、左移和右移由双线圈二位电磁阀推动气缸完成,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。其具体工作过程如图1所示。当机械手在原位(最上和最左端)时,按下启动按钮,机械手下降,下降到底时,碰到下限位开关,下降停止,同时机械手夹紧工件;夹紧后上升,碰到上限位开关,上升停止,同时机械手右移;右移碰到右限位开关,右移停止,同时机械手下降,下降到底时,碰到下限位开关,下降停止,同时机械手放松工件;放下工件后上移,碰到上限位开关,上升停止,同时机械手左移,左移碰到左限位开关,则机械手回到原位,一个循环结束。
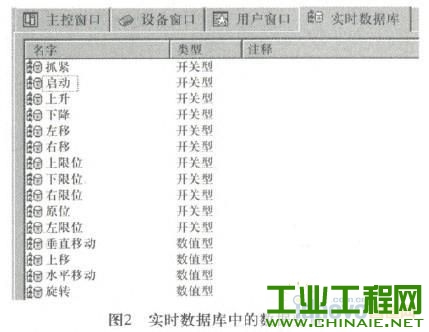
 在监控画面中,要求各限位开关的状态、机械手上升、下降、左移、右移、夹紧,放松的动作都应在系统画面中实时的得到体现。 2 组态软件MCGS MCGS工控组态软件北京昆仑自动化有限公司开发的“监视与控制通用系统”。它具有简单灵活的可视化操作界面,良好的并行处理功能,丰富生动的多媒体画面,支持国内外众多数据采集与输出设备。用户只需要完成I/O设备的配置工作,就可以利用组态软件提供的硬件驱动程序,实现与PLC的通信功能。在系统运行的过程中,由设备管理程序完成与I/O设备的实时数据交换,进而实现对监控画面中的动作控制。 3 监控系统设计 利用组态软件监控机械手工作状态,实现与下位机PLC的通讯,主要分构造数据库、设计监控画面并建立动画连接、运行策略设计、设备窗口组态设置四个步骤。 3.1 构造数据库 实时数据库是实时数据库是MCGS的数据交换和数据处理中心。当MCGS运行起来后,实数据库的对象被暴露出来,通过对象的链接和嵌人操作取到实时数据库对象,从而做到直接操作MCGS的目的。在数据库中增加数据变量,设置名称和类型。因机械手实验台有原位指示灯,有上升、下降、左移、右移和抓紧5个动作,有启动开关、上限位、下限位、左限位和右限位4个行程开关,还有脚本程序中用到的用来控制监控画面中机械手水平移动、垂直移动和抓紧动作的4 个数据量,所以一共定义了15个数值型变量。图2 为实时数据库中的数据变量。
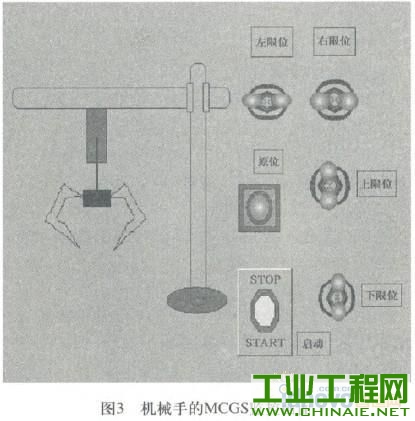
 3.2 设计监控画面并建立动画连接 监控画面的设计总体上讲就是创建友好逼真的人机界面,明确各图像元素的含义,达到图像元素的视觉效果。 在MCGS组态平台上,进入用户窗口的“动画组态”,即进入监控界面制作窗口,根据工具箱提供的图库和形象绘制组态图形。图3为机械手的MCGS监控画面,画面中有四个限位开关与实际现场限位开关对应,原位指示灯用来显示机械手是否在初始位置,启动按钮对应现场的的启动开关,另外还有机械手固定的支架和能够运动的竖杆和手爪。机械手的竖杆和手爪要同时在垂直和水平方向移动,手爪还有抓紧和放松动作。
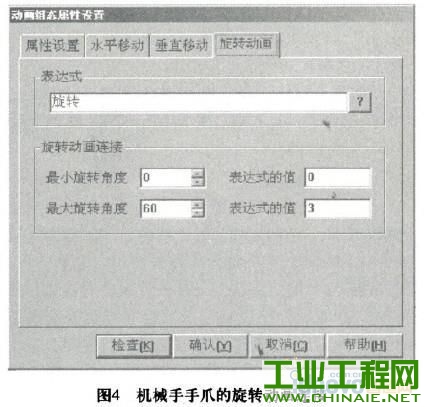
 为保证机械手在运行环境中的画面显示效果与实际工作状态相符,需要对组成机械手的各构件进行动画连接,这一工作在构件的动画组态属性设置中完成。其中,机械手手爪的动画组态属性设置最为复杂,动画组态属性设置中有水平移动、垂直移动和旋转动画,分别与数据库中的水时平移动、垂直移动和旋转变量连接。图4是机械手手爪右侧部分的旋转动画连接,连接对象是数据库中的“旋转”数值型变量,旋转角度的设置是为了在最小到最大角度变化时能够实现现场手爪的变化过程。
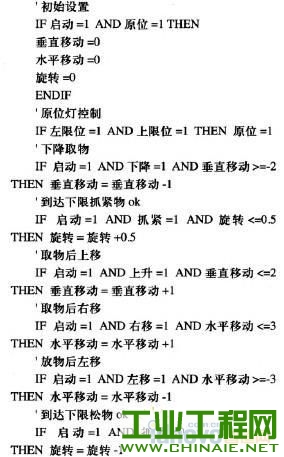
 为保证机械手的竖杆和手爪在垂直和水平方向同时动作,因此它们动画组态属性设置中的水平移动、垂直移动分别受数据库中同一数据变量控制,且最小和最大偏移量要一致。 3.3 运行策略设计 在运行策略中编写脚本程序的目的是建立与各个界面图元之间的连接,控制监控画面中的各构件动作。用户可以通过编写程序灵活地控制流程和各种操作,脚本程序的编程语法类似于普通的Basic语言。为了使画面中的机械手动作更加逼真,在脚本程序中使用了控制抓紧和放松动作的旋转数据量。脚本程序如下:
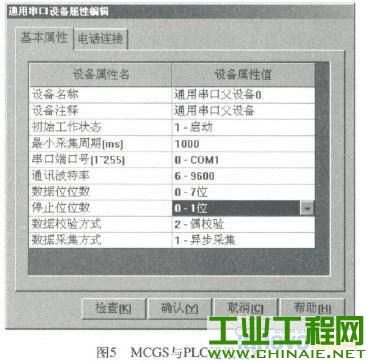
 3.4 设备窗口组态 为使监控画面中的图形对象反映实验台上对象的状态变化,达到过程实时监控的目的,需要连接PLC与MCGS,这一过程靠设备窗口组态来实现。依靠设备窗口建立系统与外部硬件设备的连接,使得MCGS能从外部设备读取数据并控制外部设备的工作状态,实现对工业过程的实时监控。 首先,在设备工具箱中添加设备,选择通用串口父设备,并将三菱FX系列编程口添加在通用串口父设备下,与控制机械手的PLC型号对应。然后,在通用串口父设备下进行设备属性编辑,选择串口端口号、通讯波特率、数据位位数、停止位位数、数据校验方式、数据采集方式,设置时注意与下位机PLC的通讯格式要保持一致。本系统采用的通讯格式如图5所示。
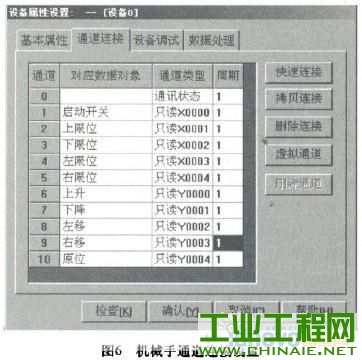
然后,在三菱Fx系列编程口下选定CPU类型,在设置设备内部属性中增加设备通道。然后进行通道连接,使组态画面中的数据对象与现场的PLC的输入和输出实现了对应连接。图6为机械手通道连接设置。
 最后,利用PLc与计算机专用的F2—232CAB型RS232C电缆,将PLC通过编程口与上位计算机串口(COM口)连接,进行串行通讯。 3.5 系统运行效果 执行完以上几步工作后,进入组态运行环境,机械手监控画面中根据脚本程序逼真显示了现场机械手的工作状态,实现了对机械手的状态实时监控。 4 结束语 利用组态软件MCGS实现对基于PLC的机械手控制进行监控和管理,综合利用了计算机和PLC的长处,计算机提供了良好的人机界面,PLC执行可靠的控制,对提高生产过程的自动化有重大意义。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1