|
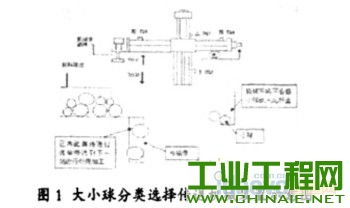
1 引言 机械手自动分拣装置是一种高速自动化生产线上的大球与小球自动分拣设备,其工作流程是物料盘负责输送物料,一旦有物料进入准备状态,则启动机械手搬运机构;然后机械手快速定位到物料的正上方,下降抓取物料、提升并释放至指定位置;待物料被释放后,传送装置联动,并根据大球(新规品)与小球(返品)的特点进行分拣;机械手则迅速返回,等待下一轮分拣抓取。本文阐述了应用三菱公司的具有高性能价格比的微型可编程控制器FX2N 系列PLC 的自动分拣大小球控制系统。该系统充分利用了可编程控制器(PLC)的多方面的设计知识和方法,精确的实现机械手从圆点的下降、抓取、上升、右行、下降、释放、上升、左行还原等一系列的动作完成这一工序。 2 机械手控制系统设计 2.1 系统描述 本设计是基于自动化程度高、工作可靠、稳定的机械手控制系统,使其完成分拣大小球的全自动的机械设计,应用三菱公司的可编程控制器FX2N 系列PLC 的自动分拣大小球控制系统,实现机械手从圆点的下降、抓取、上升、右行、下降、释放、上升、左行还原等一系列的动作完成这一工序。机械手分拣装置结构示意图见图1 所示。
 2.2 I/0 地址分配见表1 所示
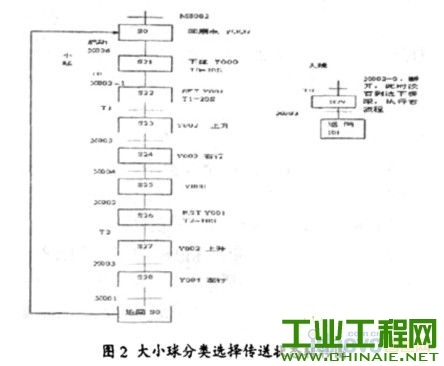
 2.3 选择性分支工作方式 (1)选择性分支 选择性分支指从多个流程顺序中选择执行某一个流程。FX2N 系列PLC 一条选择性分支的支路数不能超过8 条,初始状态对应有多条选择性分支时,每个初始状态的支路总数不能超过16 条。 (2)选择要求 ①使用传送带,将大、小球分类选择传送。 ②左上方为原点,传送机械的动作顺序为下降、吸住、上升、右行、下降、释放上升、左行。 ③机械臂下降,当电磁铁压着大球时,下限位开关LS2 断开,压着小球时,LS2 导通。此控制流程根据LS2 的状态(即对应大、小球)有两个分支,此处应为分支点,且属于选择性分支。分支在机械臂下降之后若LS2 接通,则将小球吸住、上升、右行到LS4(小球位置X004 动作)。然后再释放、上升、左移到原点。分支在机械臂下降之后若LS2 断开,则机械手臂上升、左移到原点。状态转移图中有两个分支,若吸住的是小球,则X002为ON,执行右侧流程;若为大球,X002 为OFF,执行左侧流程。 2.4 机械手工作流程 图2 列举了大小球分类选择传送状态转移图。
 3 系统调试 3.1 上机调试 PLC 程序的调试可以分为模拟调试和现场调试两个调试过程,在此之前首先对PLC 外部接线作仔细检查,这一个环节很重要。外部接线一定要准确无误。也可用事先编写好的试验程序对外部接线做扫描通电检查来查找接线故障。不过,为了安全考虑,最好将主电路断开。当确认接线无误后再连接主电路,将模拟调试好的程序送入用户存储器进行调试,直到各部分的功能都正常,并能协调一致地完成整体的控制功能为止。 3.2 程序的模拟调试 将设计好的程序写入PLC 后,首先逐条仔细检查,并改正写入时出现的错误。用户程序一般先在实验室模拟调试,实际的输入信号可以用钮子开关和按钮来模拟,各输出量的通/断状态用PLC 上的发光二极管来显示,一般不用接PLC 实际的负载(如接触器、电磁阀等)。可以根据功能表图,在适当的时候用开关或按钮来模拟实际的反馈信号,如限位开关触点的接通和断开。对于顺序控制程序,调试程序的主要任务是检查程序的运行是否符合功能表图的规定,即在某一转换条件实现时,是否发生步的活动状态的正确变化,即该转换所有的前级步是否变为不活动步,所有的后续步是否变为活动步,以及各步被驱动的负载是否发生相应的变化。 调试时应充分考虑各种可能的情况,对系统各种不同的工作方式、有选择序列的功能表图中的每一条支路、各种可能的进展路线,都应逐一检查,不能遗漏。发现问题后应及时修改梯形图和PLC 中的程序,直到在各种可能的情况下输入量与输出量之间的关系完全符合要求。 如果程序中某些定时器或计数器的设定值过大,为了缩短调试时间,可以在调试时将它们减小,模拟调试结束后再写入它们的实际设定值。在设计和模拟调试程序的同时,可以设计、制作控制台或控制柜,PLC 之外的其他硬件的安装、接线工作也可以同时进行。 4 结束语 本文介绍了大小球的物料分选装置,运用FX2N 系列PLC进行了程序的编写和调试,调试结果显示,该机械手物料分选装置能按照预定的要求进行大小球的不同选择,并放入不同的物料箱,这一控制系统的实现和应用,充分体现了PLC 系统在工业现场的应用,根据设计要求和不同的需求改变数据和状况,还可以使其应用的范围更加广泛。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

