|
在金属高频淬火加热场合,工人经常身处高温环境,劳动强度大,而且周围环境电磁辐射大,长期工作会影响身体健康。为了解决该问题,设计了高频淬火机械手,代替工人进行工作。 工人操作高频淬火机械手,就可实现在原点位置上快速安装工件、夹紧,并移动工件到高频感应线圈处进行加热;当加热到设定的温度后,系统自动停止加热并退回、旋转90°、松开工件进行淬火。在高温检测方面,由于高频加热的温升速度非常快,传感器响应时间应在0.2 s以内,因此不宜采用接触式的温度传感器,而应采用红外线或光纤高温传感器。同时在人机界面上可清晰观察机械手工作的过程、工件温度及报警列表等信息。 2 机械手工作过程 通气后机械手自动复位,然后通电,机械手松开。并在原点位置上快速安装工件并靠夹紧气缸夹紧,然后靠推料气缸移动工件到高频感应线圈进行加热,并通过红外高温传感器对温度进行采集,并反馈给PLC。当加热到设定的温度后,停止加热并退回到原点位置上,最后旋转气缸回转90°,松开工件进行淬火。具体过程详见图1所示。
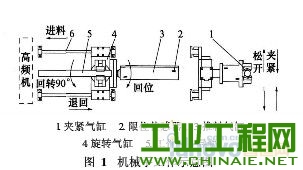 图1 机械手工作示意图 3 气动系统设计 机械手的主要动作为机构的松开与夹紧、机构的平移、机构的旋转,这3个动作分别由夹紧气缸、推料气缸、旋转气缸来完成;它们动作的执行是靠二位五通电磁阀切换气缸的进气和出气方向,使气缸活塞产生不同的运动方向。当电磁阀全部都处于失电时候,机械手处于夹紧、退回、无旋转的状态,这样也便是急停状态。当PLC启动状态时候,机械手处于松开、退回、无旋转状态,这也是PLC运行时气缸最初状态,这样安排无需松开夹紧气缸就可以放置工件,便于放置工件。由于我们采用的是二位五通电磁阀,因此通电和断电时候,气缸动作方向是相反的。所以当IY电磁阀通电时,机械手就松开工件。如果断电的时候,就夹紧工件。2Y电磁阀通电时,机械手就推出工件,断电就拉回工件。3Y电磁阀通电时,机械手就旋转90°断电时候就回转原位,详见图2所示。
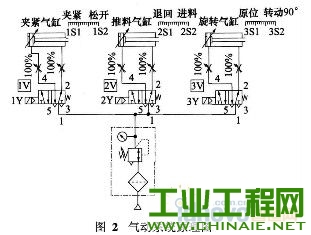 图2 气动系统原理图 机械手夹紧与松开工件是靠电磁阀1Y动作,机械手推出与拉回工件是靠电磁阀2Y动作,机械手旋转工件与旋转复位是靠电磁阀3Y动作。对于高频机启动与停止加热是靠继电器动作,具体动作可参考表1。
 4 PLC控制系统设计 1)PLC的选型 可编程控制器(PLC)种类非常多,我们选用PLCHW—S20ZA220T。这刚好满足本次设计所需的外部8个开关量和1个模拟量输入信号,4个开关量输出信号,而且点数还有余量。由于两个传感器是属于NPN晶体管型,因此选择NPN晶体管型PLC。 2)PLC的VO地址分配及外部接线设计该机械手中系统需要数字量输入8点,数字量输出量4点,1个温度模拟量输入。输入包括6个磁性开关,1个急停按键和1个复位按钮。输出包括控制3个电磁阀的信号,1个控制继电器的信号。模拟量输入包括红外高温传感器输入值为0—10 V的电压。PLC的VO地址分配如表2所示。 外部24 V电源作为输出端口电磁阀的电源,而PLC内部提供的24 V电源作为输入传感器和红外高温传感器的电源,保证输入输出电源的隔离,提高抗干扰能力;il摸屏与PLC的编程接口相联接,具体见图3所示。
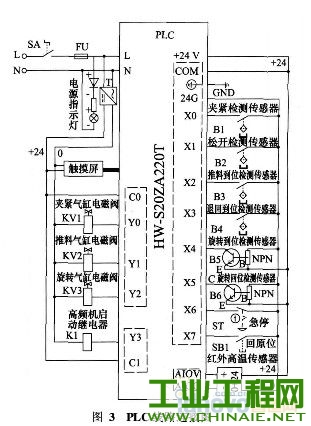 图3 PLC线路连接图 3)温度采集 对于小工件,从常温高频加热到900°,一般不到10 s,时间非常短暂。因此对传感器的反应速度要求就特别高,响应时间时间必须控制在200 ms以内,否则误差较大。由于接触式传感器热传导比较慢,有明显的滞后,因此不宜采用。综合考虑红外线和光纤非接触式温度测温仪的性价比,最终选择了德国欧普±(Optris)红外测温仪CTLT20,其量程: -40℃ ~900 oC,响应时间:150 ms,,误差1%之内,该测温仪已进行线性补偿,线性度好,可以较好实现对温度的采集。 红外测温仪输出为0~10 V或者4~20 mA的模拟量,首先设置好模拟量与数字量之间对应关系,即模拟量最小值对应测温仪温度测量范围的最小值,模拟量最大值对应测温仪温度测量范围的最大值;再利用PLC的A/D模块进行温度采集,得到数字量的温度值;最后,在PLC程序中判断是否到达设定温度值,并执行相应动作,同时在显示屏上实时显示相应的温度值和动作信息。 4)PLC程序设计 当工件放好之后,按下触摸屏上的启动按钮,夹紧气缸夹紧工件,之后推料气缸运送工件到指定位置,然后启动高频机加热,到设定温度停止加热,退回并松开工件进行淬火,然后返回原点。如此循环,一步步自动执行下去,省去了大量的人力与体力,大大提高了工作效率。 高频淬火机械手主要有3种运行方式:自动模式、手动模式、回原点模式。因此采用1个主程序和4个子程序块,即把自动模式、手动模式、回原点模式和触摸屏显示控制部份,分别单独设计成一个子程序。如果需要运行哪种模式,在触摸屏中按下相应的按键,在主程序中就可以调用相应子程序。采用子程序方法,可以减少系统的扫描时间,提高系统的执行速度,同时增强程序的可读性、可移植性,也方便了调试。 自动模式主要动作过程是顺序动作,完成一步动作之后,再进行下一步的操作,该控制系统是一个典型的步进顺序控制系统。对于步进顺序控制系统,常见的是采用步进顺序控制编程方法。而本次在梯形图设计上采用移动指令与数据转换等功能指令的方法实现步进顺序控制,具体工作流程详见图4所示。
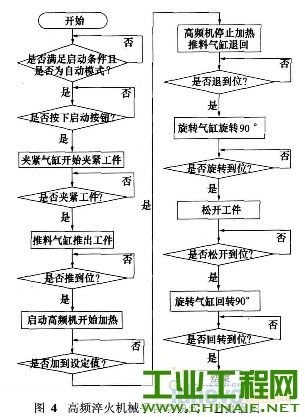 图4 高频淬火机械手自动模式工艺流程图 PLC与触摸屏通讯,很重要的一点是要实现对机械手的监控,能在触摸屏中显示相应机械手的工作状态和工件实时检测的温度。在触摸屏中除了用指示灯的亮灭显示机械手的状态外,比较直观的方法是用到人机界面上的可变文本功能。可变文本里面内容对应PLC中的某个设定寄存器,如图5可变文本功能对应PLC中寄存器v4(触摸屏中数据寄存器号4X地址516对应海为PLC中数据寄存器V4),例如数值V4中数值0对应可变文本中文字“系统准备完毕”,v4中每个数值对应可变文本中以设定好的某段文字,这样机械手处于什么工作状态,通过传感器感应,然后PLC读取传感器反馈的信息,通过程序处理,对寄存器v4赋一个特定值,在触摸屏上就能显示相应文字,从而实现对机械手工作状态的监控。
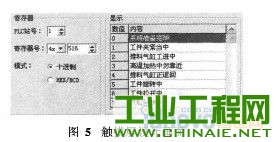 图5 触摸屏设计画面 5 实验 图6是设计的结果,经过调试,机械手能较好地实现预期的动作。工人操作简单,远离高频加热区,并可直观看到工件的实时温度和机械手的操作步骤,因此大大减轻了劳动强度,改善工作环境,提高了工作效率。
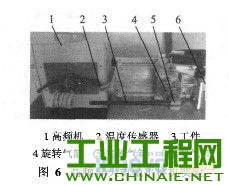 图6 高频淬火机械手样机实验 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20


 /1
/1 



