|
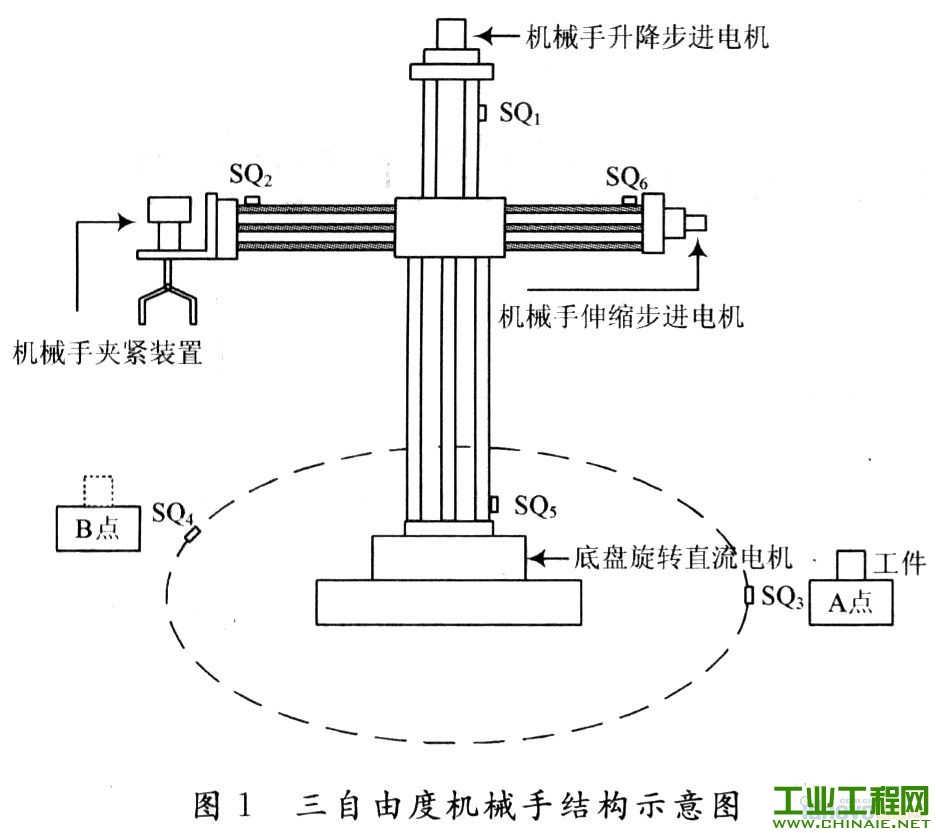
0 引 言 机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。三自由度机械手又称3D机械人,能够实现三个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大,灵活性好,应用广泛的特点。 可编程控制器(PLC)是一种专门为工业应用而设计的进行数字运算操作的电子控制装置。由于其具有可靠性高,功能强,编程简单,人机交互界面友好等特性而广泛用于工业控制系统。 步进电机是将电脉冲信号转变为角位移或线位移的开环执行元件。在非超载情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数目。这一线性关系的存在,加上步进电机只有周期性误差而无累计误差的特点,使其在速度、定位等控制领域应用得非常广泛。 机械手按驱动方式可分为液压式、气动式、电动式和机械式机械手。本文设计的三自由度机械手属于混合式机械手,它综合了电动式和气动式机械手的优点,既节省了行程开关和PLC的I/O端口,又达到了简便操作和精确定位的目的。 1 三自由度机械手的系统结构与运动方式 三自由度机械手为圆柱坐标型。图1为机械手结构示意图,机械手手臂的左右运动(水平方向)由伸缩步进电机控制,上下运动(垂直方向)由升降步进电机控制,逆时针和顺时针旋转运动则由底盘直流电机的正反转控制。机械手的夹紧装置采用关节结构,其夹紧与松开用气压驱动,并由电磁阀控制。 机械手可以根据设定程序的动作将工件从A处搬运到B处。SQ1,SQ2,SQ5,SQ6为水平和垂直方向上的限位开关,SQ3,SQ4为原点位置和终点位置的光接近开关。 2 三自由度机械手控制系统设计 三自由度机械手系统设置了手动工作方式和自动工作方式。自动方式又分为自动回原点、单步、单周期、连续四种工作方式。
 2.1 硬件设计 主控制系统选用三菱FX2N系列晶体管输出型PLC,步进电机驱动器选用SH-20403型模块。机械手的外部接线图如图2所示。
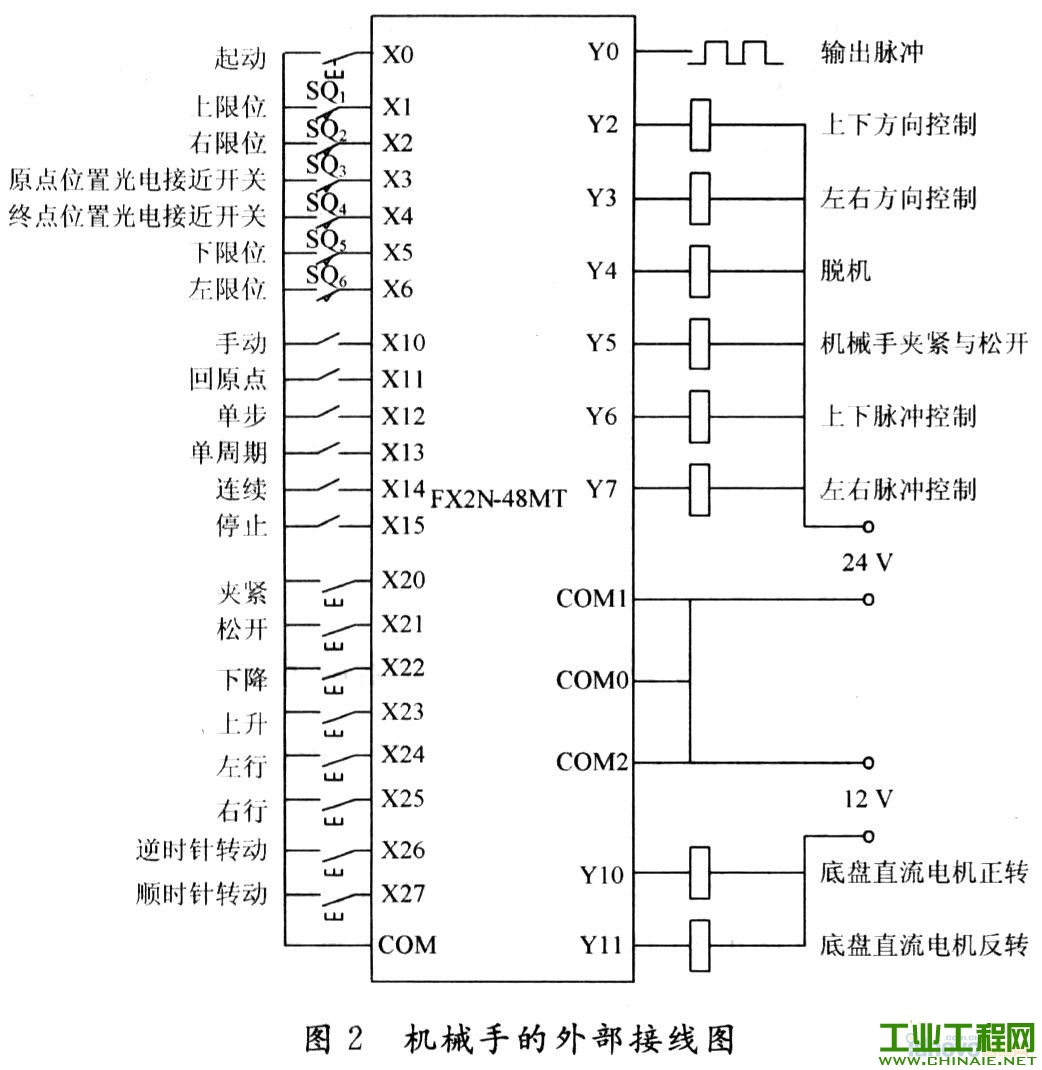 机械手在最上面、最右边,底盘转至光接近开关X3处且夹紧装置松开时称系统处于原点状态。X10为手动控制按钮,按下该按钮后,可以进行按键开关X20~X27对应的手动操作。X11~X15分别为自动方式中的回原点、单步、单周期和连续工作方式按钮,按下其中的某一个按钮,再按起动按钮X0,该工作方式的动作就会自动执行。步进电机只有在有脉冲信号(Y0)和方向信号(Y2或Y3)输入时才会转动,Y6,Y7选择将脉冲信号Y0送至哪个步进电机。Y5控制送气电磁阀,实现夹紧装置的夹紧与松开。Y10,Y11控制底盘直流电机的正反转。 2.2 软件设计 在选择单步、单周期和连续工作方式前,系统应当处于原点状态。如果不满足这一条件,可以选择回原点工作方式,该工作方式依次执行以下操作:向上运动至上限位x1→向右运动至右限位X2→顺时针转动至光接近开关X3→夹紧装置松开。 机械手自动工作方式的顺序功能图如图3所示。机械手手臂的运动速度由输入步进电机的脉冲频率控制,机械手下降及左行的距离由脉冲数控制,脉冲频率和脉冲数可以根据工业现场的实际情况在程序中设定,具有可重复操作性。
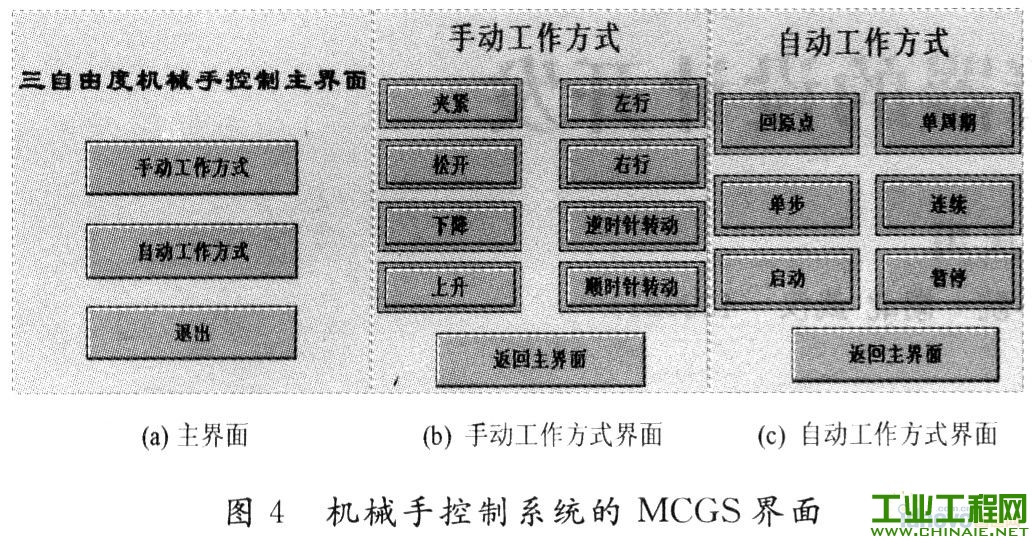
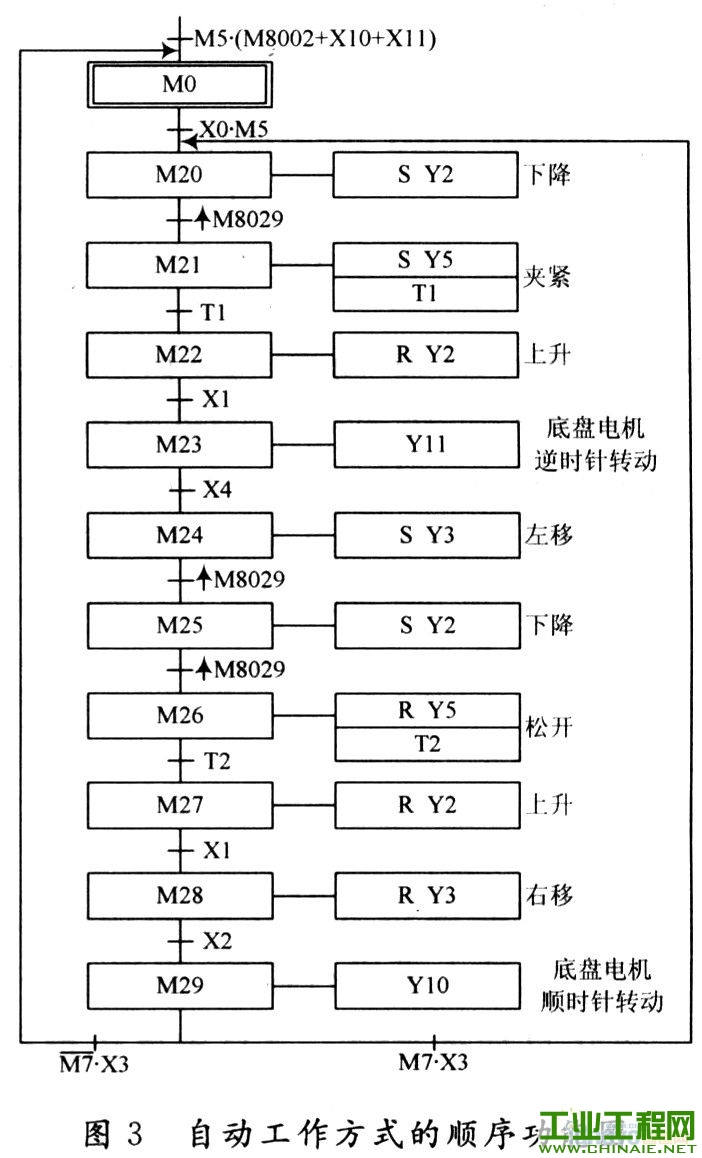 本系统采用的是PLC梯形图顺序编程的方法。其中以PLSY脉冲输出指令输出脉冲,用MOV指令设定脉冲个数,指定脉冲输出完后,指令执行完成标志M8029置1。由于PLSY指令只能使用一次,而系统中两个步进电机均需要脉冲输入,设计中采用两个外部继电器解决了该问题。将Y0输出的脉冲同时接至两个继电器动触点,两继电器的常开触点分别与两块步进电机驱动器的脉冲输入端相连,Y6,Y7接到两继电器的控制端,这样就可以通过Y6,Y7来控制步进电机的脉冲输入。 3 系统的MCGS组态环境 MCGS是为工业过程控制和实时监测领域服务的通用计算机系统软件,具有功能完善,操作简便,可视性好,可维护性强的突出特点。图4为三自由度机械手系统工作时的MCGS组态环境界面,它包括主界面、手动工作方式界面和自动工作方式界面。
 4 结 语 经调试,步进电机的运转无抖动和失步现象发生,机械手系统处于良好的运行状态。三自由度机械手系统实现的只是三个自由度方向上的运动,根据工业生产的实际需要,可以对其进一步改进,在夹紧装置肘部添加腕回转控制装置,就能使之成为四自由度机械手控制系统。在条件允许的情况下,也可以采用触摸屏代替MCGS组态环境对机械手系统进行控制,这样占用空间小,人机交互界面直观,操作更方便。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

