|
采用机械手代替人进行重复地取放件工作,保证了产品品质和生产安全的同时,也提高了生产自动化水平和效率。PLC是以微处理器为核心,将自动化技术、计算机技术和通信技术融为一体的新型工业控制装置,具有高性价比、高可靠性等特点,已成为自动化工程的主要核心设备。齿轮淬火机械手的控制系统选用FX2N系列可编程序控制器控制,该系统结构紧凑、工作可靠,可以实行手动调整及自动控制。 1 系统的硬件设计 齿轮淬火机械手采用圆柱坐标的结构形式,由回转、升降、手臂伸缩、手部夹持及定位五种机构组成。由于手部夹持及定位机构靠近保温炉,工作温度高,因此采用气压传动,其余采用液压传动,从而使得机械手结构紧凑,运动平稳,且可以方便地实现无级调速。机械手的执行运动采用液压驱动和气压驱动,系统由电磁换向阀控制液流方向和气流方向,从而控制液压缸和气缸的运动方向。基于PLC的电气控制系统是通过控制电磁换向阀的电磁铁线圈的通断,来实现对机械手运行动作的控制。 机械手的手臂尺寸较长,回转惯性也比较大,为了保证能准确抓放齿轮工件,机械手臂在水平面内回转须有精确的定位,系统采用单作用气缸推动插拔销的机械定位方式来实现。在机械手回转到位时,限位开关检测到信号,系统使YA1和YA2断电,回转缸停止转动,同时使YA9通电,定位气缸推动插拔销实现机械定位。 机械手的PLC电气控制系统,采用限位开关(SQ1—SQ6)作为位置检测信号,按钮开关SBl和SB2作为系统的启动和停止控制,PLC的输出信号分别接各缸的电磁换向阀电磁铁YA1-YA9,各I/O分配如表1所示。
 所设计的齿轮淬火机械手电气控制系统为纯开关量逻辑控制,所需输入点为11个、输出点10个,考虑系统的扩展方便,系统的PIE选用三菱的FX2N-32MR。系统输入指令信号为开关按钮等无源器件,直接接人PLC对应的输人端子,另外一端接PLC的输入COM即可。系统所驱动的负载均为24 V直流电磁阀线圈,为了保护PLC输出元器件,在电磁铁的两端各反并联一续流二极管,防止在感性负载断开时产生很高的感应脉冲电压对PLC输出点及内部电路的冲击,保证系统的安全稳定。 2 系统控制程序设计 齿轮淬火机械手有手动调整和自动循环运行两种工作方式,由控制方式转换开关SAl进行选择,其常开触点接通时为手动调整,断开时则为自动循环运行。机械手的手动调整控制程序与自动运行控制程序相对独立,因此总程序设计成两段独立的部分:自动运行控制程序和手动调整控制程序,通过条件跳转来选择执行相应的控制程序。当选择手动调整方式时,输人点Xll接通,其常闭触点断开,执行手动调整程序,并且X11常开触点闭合,则跳过自动运行程序段。若选择自动运行方式,则跳过手动调整程序,执行自动运行程序段。 手动调整用于检修及动作行程等调整,由于其使用时间很少,因此为了节约I/O点,只采用启动按钮SB1、停止按钮SB2和调整选择按钮SB3进行循环操作控制。当控制方式选择转换开关常开触点闭合时,通过按动调整选择按钮的次数来选择所需调整的部件,并且当前所选部件通过调整指示灯Ll来显示。L1具体显示方式为:常亮为机械手回转调整,以0.5 Hz闪烁表示为升降调整,以1 Hz闪烁表示为伸缩调整,亮0.5秒灭2秒为夹持调整,亮2秒灭0.5秒为定位调整。选择好调整部件后,通过按SBl和SB2来控制部件运行,均采用点动方式。如Ll常亮为机械手回转调整,此时按住启动按钮SBl,机械手左转,松开即停止,按住停止按钮SB2,机械手右转,松开即停止,其它部件调整动作以此类推。手动调整控制程序设计比较简单,均为简单的点动和联锁。L1的控制方面,0.5 Hz闪烁直接用M8013,其它的用方波发生控制程序,设定相应时间参数即可。通过按动调整选择按钮的次数来选择所需调整部件的程序,主要采用计数器对X12进行计数,并且通过触点比较指令进行数值判断,从而确定控制对象及执行对应控制程序,最后有复位循环执行功能。PLC手动控制部分梯形图如图1所示。
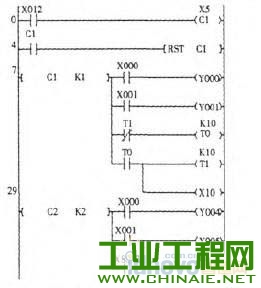 图1 PLC手动控制部分梯形图 当机械手工作于自动运行方式时,其工作过程为:(炉门打开)手臂伸出→手指夹紧(抓住齿轮工动,件、延时1秒)→上升(抬起工件)→手臂缩回、定位缩回→左转900_定位伸出_手臂伸出→下降_手指松开(放在淬火压床工作台上、延时1秒)_手臂缩回(延时、等待工件淬火,淬火完成)_手臂伸出→手指夹紧(延时1秒)→上升_手臂缩回、定位缩回_左转90°→下降→_手指松开(把齿轮放人滚道、延时1秒)→右转180°、定位伸出(原位)。机械手完成一个循环,再按启动按钮,机械手又重复上述动作。这是一个典型的按确定顺序动作的步进控制过程,有条件控制和时间控制两种方式,条件即为限位开关和按钮,用顺序功能图和步进梯形图进行编程。 3 结束语 基于PLC的机械手控制系统具有很大的灵活性和适应性,当工艺过程改变时,能通过简单改线和修改控制程序来满足新的控制要求,同时还具有可靠性高、运行稳定等优点。文中涉及的控制方式方法也可以应用于其它类似的机械手控制系统。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

