|
1 前言 随着机械手技术的发展,加上PLC控制技术及电机控制技术的应用,适用于工业自动化生产的通用机械手得到了广泛的应用。由于气动机械手结构简单、控制方便、定位准确,因此在自动化生产线上得到了广泛应用。本文将介绍一种采用PLC与步进电机控制的气动搬运机械手。 2 气动机械手的结构及工作原理 2.1 气动机械手的结构 图1为气动机械手的结构及动作示意图,它由推料气缸l、单杆气缸3、双导杆气缸4、气动手爪5、电感传感器、步进电机7等组成。其主要元件功能如下:
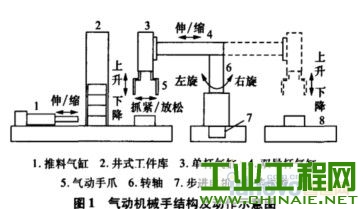 图1气动机械手结构及动作示意图 (1)推料气缸将工件从井式工件库中推出至料台。 (2)气动手爪完成工件的抓紧与放松动作。 (3)双导杆气缸控制机械手臂伸出与缩回。 (4)单杆气缸控制气动手爪的提升与下降。 (5)步迸电机控制机械手臂的左/右旋转。通过脉冲个数进行精确定位。 另外,该机械手中设置的电感传感器用于机械手臂左/右旋转时的位置检测。 2.2 气动机械手的工作原理 气动机械手的气动原理如图2所示。该气动系统主要包含4个气缸:推料气缸2、伸缩气缸3、升降气缸4和气动手爪5。其中,推料气缸、伸缩气缸和升降气缸均由单电控二位五通阀14、15、16控制,气动手爪由双电控二位五通阀17控制。单向节流阀6—13用来提高气缸动作时的速度稳定性。
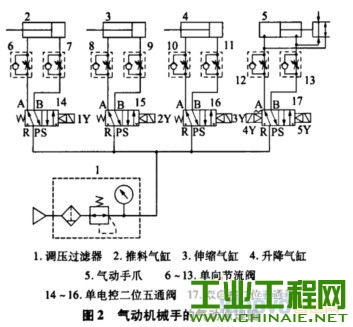 图2气动机械手的气动原理图 该气动机械手工作过程为:当工件推入存放料台后,气动机械手手臂前伸→前臂下降→气动手指夹紧工件→前臂上升→手臂缩回→手臂右旋到位→手臂前伸一前臂下降_+手爪松开将工件放人料口_前臂上升-+手臂缩回-+机械手左旋返回原位,等待下一个工件到位,然后重复上面的动作。 气动机械手的左/右旋转靠步进电机驱动实现,本系统选用了三相混合式步进电机及细分型步进电机驱动器作为机械手旋转运动的驱动装置和定位装置。为了机械手定位需要,在机械手底座装有电感传感器作为机械手的基准传感器,并在机械手左/右旋转的极限位置装有限位开关。 3 气动机械手控制要求 气动机械手采用气动阀控制,在搬运工件过程中,实现机械手搬运工件的准确控制,同时显示系统的工作状态。出现突发事件时,应做相应处理。具体要求如下。 1)气动机械手搬运控制要求 当存放料台光电传感器检测工件到位后,机械手手臂前伸,手臂伸出限位传感器检测到位后,延时0.5s手爪气缸下降,手爪下降限位传感器检测到位后,延时0.5 s气动手爪抓取工件,手爪夹紧限位传感器检测到夹紧信号后,延时0.5 s手爪气缸上升,手爪提升限位传感器检测到位后,手臂气缸缩回,手臂缩回限位传感器检测到位后,手臂向右旋转,手臂旋转完成一定角度后,手臂前伸,手臂伸出限位传感器检测到位后,手爪气缸下降,手爪下降限位传感器检测到位后,延时0.5 S气动手爪放开工件,手爪气缸上升,手爪提升限位传感器检测到位后,手臂气缸缩回,手臂缩回限位传感器检测到位后,手臂向左旋转,等待下一个工件到位,重复上面的动作。 2)启动、停止、复位、警示系统上电后,点动“复位”按钮后系统自动复位,将存放料台清空。 点动“启动”按钮,警示绿灯亮,缺料警示黄灯闪烁,放人工件后设备开始运行。按“停止”按钮,所有部件停止工作,警示红灯亮,缺料警示黄灯闪烁。 3)系统突然断电的处理系统如突然断电,设备立即停止工作。电源恢复后,点动“复位”按钮,再点动“启动”按钮,机械手按照控制要求(1)运行。 4 气动机械手控制系统设计 4.1 气动机械手动作流程工艺分析 根据气动机械手的动作流程及系统的工作原理,将气动机械手动作顺序、电磁铁状态以及步进电机的脉冲信号PUL和方向信号DIR的状态列于表1所示。
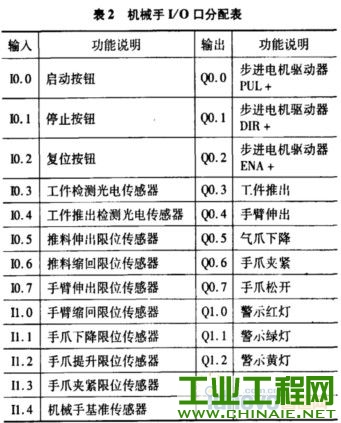
 4.2 PLC I/O口分配 根据输入输出的特点及数量,本系统采用西门子S7-200系列PLC作为控制器。表2为气动搬运机械手控制系统的I/O口分配表。
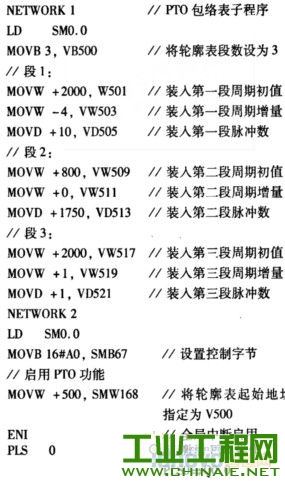
 4.3 气动搬运机械手软件设计 气动机械手动作流程简单,且规律性强,在进行软件设计的时候可以采用移位指令实现,这里略去。在本机械手软件设计中,较为复杂的是步进电机的控制。在步迸电机控制电路中,步进电机驱动器的脉冲信号PUL、方向信号DIR分别南PLC的Q0.0和Q0.1提供,通过程序设置脉冲数目和步进电机的转动方向,从而实现对机械手左/右旋转的精确控制。 根据步进电机的工作特点,软件设计时采用s7—200 PLC的高速脉冲输出指令PLS实现步进电机的定位控制。高速脉冲输出指令有高速脉冲输出PTO和宽度可调脉冲输出PWM两种方式,采用PTO方式,用户可以控制脉冲的周期和个数,根据系统要求,选用PTO高速脉冲输出方式。 由于步进电机在启动时如果突加高频脉冲,电机会产生啸叫、失步,甚至不能启动,停止时也不能将脉冲从高频突降至零,因此步进电机在经历启动→运行→停止时必须经过加速→高速运行→减速3个阶段。因此,在使用PTO指令时采用多管线控制,设置总包络段数为3。 下面为步迸电机控制搬运机械手定位的部分程序代码。
 5 结论 本文介绍的采用PLC与步进电机控制的气动搬运机械手原理简单、性能可靠。经实验证明,该机械手控制方便、定位准确。实际应用中可根据需要修改机械手动作流程,方便实用。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

