|
1 引言 计算机与数控机床联网,可实现通信控制的功能。但在上位机与数控机床通信过程中经常会遇到忘记文件名、文件名冲突或不清楚文件信息等问题,文件列表互操作的方式可解决这一问题,将文件信息逐一列出,使操作直观、简便。 2 实现方法 实现文件列表的互操作,数控系统须增加相关的通讯协议,上位机中运行的程序应根据数控系统的通讯协议编写代码。
 (1)上位机向数控系统发送文件请求 通讯过程为:上位机向数控系统发送一个文件请求,数控系统收到文件请求后搜索机床中存在的文件,然后将机床中的文件信息以列表形式发回给上位机。上位机在文件列表中选择适当的文件,将文件名下发到数控系统,最后数控系统将该文件上传给上位机,上位机将其保存,操作完成。以下是数控系统中文件列表相关的通信协议: S1。进入等待循环,当收到上位机传来的Ask请求时进入S2。 S2。发送方获取文件信息、按下表1格式组帧并上传。每上传一帧,等待接收方的接收确认,然后继续上传,直到传完最后一帧,置ListEnd为真。 S3。进入等待循环,当收到上位机选中某一文件后传来的文件名,进入S4。 S4。将该文件上传至上位机,操作结束。
 ★接收方(上位机)的操作步骤: R1。向数控系统发出文件请求,然后进入等待循环,当收到数文件信息字符串时进入R2。 R2。将收到的字符串Out—Str保存,检查帧标识,当帧识为真是停止接收。 R3。解析收到的Out—Str字符串,将文件信息填入表中,并显示出来,如图1。
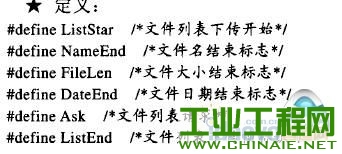
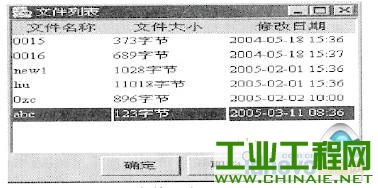 图1 文件列表对话框 R4。将用户选择的文件名下传到数控机床,进入待循环。当收到文件起始符时进入R5。 R5。接收并保存文件,操作结束。 数控系统与上位机文件列表互操作有两种方法。一是上位机向数控系统发送文件请求,数控系统收到后搜索文件,将其以列表形式回传,上位机再选择适当文件下发数控系统,最后数控系统将该文件上传上位机保存。二是数控系统向监控机床的上位机发出文件请求,通过回应机床文件请求搜索文件夹、检索目录等完成文件列表。 (2)数控系统向上位机发出文件请求 通讯过程为:上位机对机床进行监控,当某台机床向上位机发出文件请求时,上位机回应,然后搜索预定保存NC程序的文件夹。上位机自动检索保存NC程序的目录,将所有文件的文件名、文件大小、文件修改日期等信息根据表1所示的模式组帧下传至机床。数控系统将收到的信息显示成文件列表,用户选择后再将文件名上传至上位机,上位机根据文件名将该文件下发到数控机床。 上位机端程序用线程控制,主干部分代码为:

3 小结 经验证,利用上位机与数控系统互操作中文件列表的方法实现NC程序传输和远程调用,操作方便、简单可靠。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1