|
工业机械手是融合了机械技术、电子技术和计算机技术等现代技术的一种典型的机电一体化产品,它模仿人的手部动作,按预定程序、轨迹和要求实现自动抓取、搬运和操作等动作,它能适用高强度的工作,可以具有很高的精度,而且可以在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境下正常工作,因此,生产中应用机械手代替人作业,可以保证产品质量、提高生产的自动化水平和劳动生产率;可以减轻劳动强度,实现安全生产。机械手现已广泛应用于制造、物流、包装等行业。 早期机械手的电气控制系统一般采用继电器和开关元件,不能实现较为复杂的逻辑控制和较多功能控制方式的选择,因而现场使用功能和控制方式单一,现在PLC广泛应用于工业机械手控制中,大大提高了机械手的性能。下面介绍PLC控制技术在电机座加工线卸料机械手中的应用。 1 卸料机械手的结构和工作原理 电机座加工线卸料机械手用于电机底座的自动加工线上。该自动加工线分为第1段和第n段,分别对电机底座的两个端面进行加工,卸料机械手用来从第1段生产线的电机座输送带上卸下工件,并将工件放置到前输送带上的合适位置,经翻转再装到第11段线上进行连续加工。该机械手采用液压驱动,有两个自由度:一个回转自由度和一个升降自由度。主要结构包括大臂、大臂回转装置、小臂和手部等。
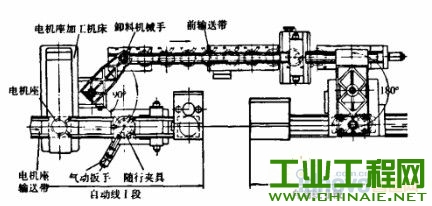 图1机电座加工线 2 卸料机械手工作流程 机械手的起始状态:大臂处于右极限位置,小臂位于上极限位置,手部的手指缩回。电动机座在第一段自动线上完成一个端面的加工后,电动机座输送带将工件,连同随行夹具送到卸料工位,当随行夹具已定位,气动扳手松开工件时发出指令,卸料机械手开始动作,机械手小手臂的升降油缸将手部下降到取料位置,手部的手指伸出,夹紧工件,然后小手臂上升,将工件提起到预定的高度,并且前输送带前进到终点时,大手臂左转90°,此后小手臂下降将工件准确地放到前输送带的适当位置上,然后,手指缩回将工件松开,小手臂上升,上升到上限位后,大手臂反方向回转90°复位,至此一个循环结束。 3 卸料机械手的液压系统 卸料机械手的大臂安装在大手臂回转装置的回转轴上,通过无杆活塞油缸带动齿轮机构来实现大手臂转动,小手臂的升降和手指的伸缩是通过双作用活塞式油缸实现的。 机械手各个油缸的换向是采用双线圈二位五通电磁阀来实现,由于机械手定位必须准确,而行程开关难以实现精确定位,因此在机座上安装挡铁使得大手臂在左右极限位置时能精确定位,小手臂的上下极限位置、手指伸缩油缸的上下极限位置的精确定位则是依靠活塞和液压缸端盖相碰来实现的。机械手的液压系统原理图如图2所示。
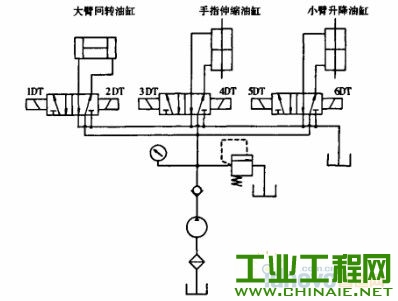 机械手的液压系统原理 4 卸料机械手的PLC控制系统 机械手既可以手动控制,也可以自动运行,手动控制可以用来进行机械手调试和在异常情况下的复位,通过控制台上的按钮可以手动控制机械手手指的夹紧放松,大臂的回转以及小臂的升降,为了不占用PLC的输人点,手动控制是通过按钮和接触器等硬件实现的。根据机械手的硬件和控制要求,PLC的输入和输出点分配如表1。
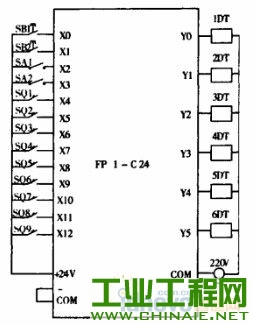
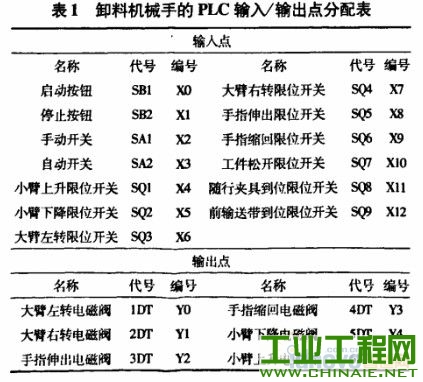 卸料机械手选用松下FPl机型的PLC , FPI是松下电工生产的小型PLC产品,该产品有C14-C72多种规格,具有体积小、功能强、性价比高等特点。它适用于单机、小规模控制,在机床、纺织机械、电梯控制等领域得到了广泛的应用。根据控制要求,机械手需要12个输人点,6个输出点,考虑到PLC的输人、输出点应该有一定的余量,选择FP1的C2A型PLC,该型号的PLC有16个输人点和8个输出点。 根据机械手的功能和输入输出点分配设计出卸料机械手的PLC接线图,如图3所示。
 5 结论 PLC工作可靠、接口丰富、应用灵活、编程方便,非常适用于控制按一定动作序列运行的机械手,而且可以在不更改硬件或硬件变动很小的情况下,通过改变软件来改变机械手的运行方式,从而使机械手适用不同的工作要求,提高机械手的灵活性和可靠性。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

