|
1 前言 机械手能模仿人手和臂的某些动作功能,用于按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手韵灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2—3个自由度。本文设计的是一个五自由度工件搬运气动机械手。 2 气动机械手的结构 该气动机械手具有五自由度(手指运动不计人自由度数),结构示意图见图1。臂部有3个自由度,即手臂的水平回转1、俯仰2和伸缩3;腕部有2个自由度,即手腕的上下摆动4和回转5。除上述5个动作外,在机器人的基本动作中还有手爪的夹紧动作6。
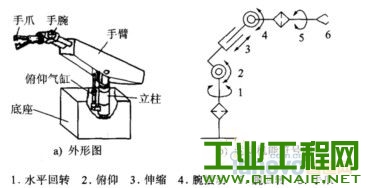 图1气动机械手结构示意图 它的动作循环为:底座顺时针旋转(90°)二俯仰气缸上升-手臂伸出-手腕俯下-手腕回转-手指张开-手指夹紧-底座逆时针旋转-手指张开-手腕仰起-手腕回转-手臂缩回-俯仰缸下降的预定的程序和轨迹等要求实现自动抓取、搬运及操作。机械手主要由驱动系统、控制系统、检测装置和机械执行机构组成。 3 气动机械手的气动系统原理 气动机械手的气动系统图如图2所示。双电控换向阀可以保证电气系统发生故障时,机械手的动作不变。气缸D靠自重下落,上升和下降分别为进气节流调速和排气节流调速。电磁阀14与FD的线圈互锁,用来防止气路突然失压时,升降气缸D的立即下落。三位五通阀FE可以使手臂回转实现多点定位。减压阀13可以精确调整手指的夹持力,防止夹持时工件或手指受损。两个快速排气阀11、12,既可加快气缸C起动速度,又可全程调速。各气缸的到位信号由磁性开关产生,PC控制器检测到信号后控制电磁阀做出下一步动作。
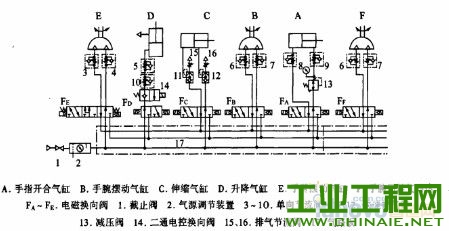 图2气动机械手气动系统图 4 气动机械手PLC控制 应用PLC控制机械手实现各种规定的预定动作,可以简化控制线路,节省成本,提高劳动生产率,该设计中全部采用双电控电磁阀作为驱动气缸的主控阀。输入信号端:12个行程开关发出的信号,另外根据系统控制的要求,需要START,POSITION和RESET共3个按钮信号,1个STOP按钮信号,还需要1个用来控制机械手运行方式的AUTO/MAN旋动开关。输出信号端:用来驱动6个气缸的电磁阀需要12个输出信号,电磁阀14需要1个输出信号,3个用来显示工作状态的START,RESET,POSITION信号指示灯。利用PLC进行多气缸顺序动作控制的特点: (1)整个控制系统包括PLC控制部分和气动控制部分; (2)可用双电控电磁阀或单电控电磁阀或采用阀岛进行气路转换,结构紧凑; (3)信号控制可用行程开关,也可根据需要用非接触式传感器接收信号; (4)工作可靠性高,大大提高了生产率; (5)运用PLC控制与计算机通信可实现远程控制,因而在生产中运用广泛。 5 结束语 本文介绍的五自由度气动机械手,工作可靠、定位准确、气动控制回路简单、电气控制容易实现、成本相对低,很适合用于工业中单调、频繁的搬运或抓取类工作。另外由于该机械手的气压系统可以进行速度调节、执行机构的灵敏度及线性度、故障模拟、机械手在负载下的重复精度等多项试验,因此可以用于教学实验,且具有良好的示教性。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

