|
1 引言 传统冲压生产过程存在着一些问题和缺点。表现在冲压加工时产生的噪音和振动两种公害,而且操作者的安全事故时有发生。这些问题并不完全是由于冲压加工工艺及模具本身带来的,而主要是由于传统的冲压设备及落后的手工操作造成的。随着计算机技术的发展,特别是机电一体化技术的进步,这些问题正逐步得到解决。下面介绍~种应用于冲压生产过程的基于PLC的自动续料专用设备,该设备是一种用于旋转式密封圈骨架冲压成型过程中多个工位间的传送搬运机械手。与传统的人工续料相比,该冲压过程中采用工业机器人(机械手)代替工人操作,构成冲压自动化生产线。提高了劳动生产率,并且极大的降低Jr生产过程的事故率。 2 该冲压件的生产工艺分析 设计某种冲压件的自动续料专用设备,首先需要了解冲压件的生产加工过程。该冲压件从毛坯料到产品共需要j次冲压加工,依次为拉伸—>反拉伸—'冲孔。该设计采用多—亡位同时冲压方式,即把多道工序的模具放置在同一套模座上,利用冲床的的一次往复运动使安装在模座上的拉伸、反拉、冲孔三副模具同时工作,冲床动作完成且冲头同到最高位后,自动续料机械手开始动作实现工件在三个工位间的传送。 3 机械手动作的规划 机械手设备由三部分组成,分别为进料部分、自动续料部分和收料部分。进料部分作用是将毛坯料由料椭推入上料工位;自动续料部分是该设备的主要机构,通过该部分实现了工件依次在不同的冲压工位上加工;收料部分的作用是将加工好的T件通过滑道收集到指定的位置,同时在牛产过程中产生的废料也通过其他滑道收集。各部分动作都在PLC的控制下有序进行,最终实现从毛坯料到产品的加工过程。 自动续料机械手在工作过程中需要将工件依次放置到相应的冲压加工工位上,实现工件在不同工位卜传递需要的循环动作如图1所示,该工作过程中机械手需具备升降、旋转、手爪开合三个自由度。
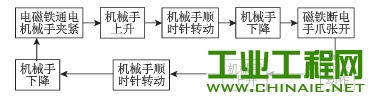 图1机械手装置的动作图 4 自动续料机械手结构设计 该机械手结构上共包括四部分:分别为回转机构、上升下降机构、机械手爪机构和电磁吸盘机构四个部分。其结构简图,如图2所示。
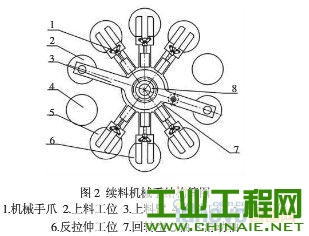 (1)回转机构包括传动齿轮、轴承座、回转空心主轴和回转伺服电机等;当伺服电机工作时通过传动齿轮带动空心主轴进行旋转。 (2)上升下降机构包括滑动轴和升降气缸,滑动轴安装在回转空心主轴中间,即可以随回转空心主轴转动,也町相对其上下滑动。升降气缸固定于底板之上,气缸活塞杆与滑动轴底端连接。 (3)机械手爪机构包括连杆、滑块、手爪和手爪气缸;气缸固定在回转盘上面,气缸活塞杆与滑块连接,气缸活塞的伸缩可推动滑块滑动;连杆一端与滑块连接,另一端与手爪连接;当滑块滑动时手爪实现开合动作。 (4)电磁吸盘机构包括支撑臂、定位销、电磁吸盘;上料臂通过轴承与滑动轴上部相连接;气缸销安装在回转盘底部;电磁吸盘固定在上料臂上。当电磁吸盘动作时定位销伸出,这样支撑臂即可和网转盘一起转动;当定位销缩回时支撑臂可绕轴承转动,最终停到零点位置。 5 机械手的电气控制分析 该自动续料机械手的各动作由PLC的控制来实现,当设备正常工作时通过各传感器采集实时信号传送到PLC中进行处理后确定机械手下一步的动作。该设计中PLC采用三菱公司FX2系列的产品。下面根据机械手的动作图对各动作过程进行分析,如图3所示。
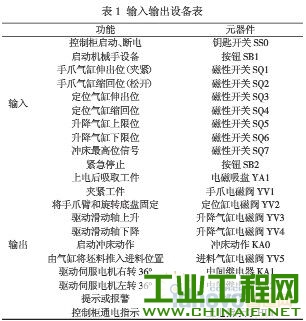
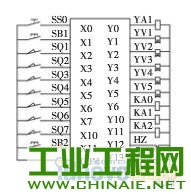 图3 PLC外部接线图 (1)首先接通电源并打开系统开关SSO后,振动料箱通电开始动作,毛坯料在振动的作用下滑入料筒,当滑人的坯料堆积到一定高度时,固定在料筒上部的接近开关产生信号使中间继电器动作切开震动料箱的电源。 (2)当双手启动SBI按下后,设备开始正常运行。首先机械手爪电磁阀YVI动作使各手爪夹紧工件、电磁吸盘YAI上电、定位气缸电磁阀YV2动作。当上述气缸动作到位后电磁开关SQ I、SQ3有信号,则升降气缸电磁阀YV3动作。当升降缸升到上位后电磁开关SQ5有信号,此时进料气缸电磁阀YV5动作,同时PLC输出端的中间继电器KAI动作,伺服电机接收到信号开始动作。当伺服电机到达右位时升降气缸电磁阀YV4动作,升降缸开始下降。 (3)当升降缸下佗电磁开关SQ6有信号后,PLC的输出端YA1、YV1、YV2断电,此时手爪张开、电磁吸盘断电、定位销缩回。这时各工件放置到相应工位,此时PLC输出端驱动中间继电器KAO动作启动冲床动作。当冲床回到最高位时SQ7有信号,此时YV3动作升降缸再次上升,滑动轴升到最高位时SQ5再次有信号,此时KA2动作伺服电机开始左转回到左位,电磁阀YV4再次动作使升降缸下降回到初始位置,循环动作。 (4)其中HLl为设备的上电指示灯,当钥匙开关打斤时HL1上电指示灯亮。HZ为报警蜂鸣器,通过对PLC软件的编程使它在工作中起到提示和报警的作用。按钮SB2为紧急停止按钮,当设备在工作过程中遇到异常状况时按下,使整个设备断电。如表1所示,输入输出设备表。
 6 控制系统软件设计 系统的控制方式有两种:自动模式和调试模式。由一个i位选择控制,当开关置于自动模式时系统处于自动运行方式,此时机械手设备根据各气缸E的磁性开关状态及各传感器的状态自动接通或断开向PLC输入信号,经过处理后输出端驱动各负载的动作。实现机械手将上件在各工位中连续的搬运动作。当开关置于调试模式状态时,通过控制面板上的按钮向PLC的输入端输入信号,经PLC处理后输出位做相应动作。调试模式状态下操作人员可将机械手的各个动作分解,从而调试设备或排除故障。 应用PLC控制工业生产过程,编程简单且调试方便,系统的程序流程如图4所示,根据工艺动作分析及系统程序流程可绘制出相应的梯形图,然后编制出相应的程序。
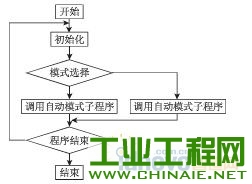 图4系统程序流程图 7 结束语 实践证明,基于PLC的控制系统的快速性及可靠性使整个控制系统简单,维修方便,功能更强,运行更可靠。采用该控制系统为核心的旋转式自动续料机械手设备进行生产,极大的提高了生产率,现在每天的产量相当于六名技术工人一天的工作量,同时该冲压生产过程的续料过程是通过机械手自动完成的,使整个生产过程的安全性大大提高了,极大的减少了工伤事故的发生。但同时也存在一些问题,如机械手对于工件的抓取有一定的失误率,而且该设备的制造精度要求较高。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

