|
0 引言 机械手和机器人是工业自动化的重要装置。在机械制造和加工企业中,机械手常被用于单机或自动线上专区传送工件、刀具、材料等,以减轻操作工人的劳动强度,同时还可以大大提升生产效率。 本文以深孔专用镗床的上、下料工业机械手为例,用PLC控制系统实现控制。该机械手可用于汽车底盘厂自卸车举升油缸的专用深孔镗床的上料和下料,以实现单机自动化。 1 确定控制对象的控制要求 (1)机械手的结构和运动 机械手的外形及料架配置如图1所示。机械手主要由手指、手腕、小臂和大臂等组成。料架为旋转式,由托料盘和刺轮机构等组成,托料架上能放六个待加工的缸筒,料架每送一次料要单向运转60度。以实现待加工工件的转换。机械手的运动主要包括:手指的夹紧和松开,手腕的横移,小臂的伸缩,大臂的摆动。 机械手的动作顺序:原始位置(大臂竖立,小臂伸 出并处于水平、手腕横移向右、手指松开)→手指夹紧(抓住卡盘上的工件)→手腕横移向左(从卡盘上卸下工件)→小臂上摆→大臂下摆→手指松开(将工件放在料架上)→小臂缩回→料架转位→小臂伸出→手指夹紧(抓住待加工的工件)→大臂上摆(从料架上取走工件)→小臂下摆→手腕横移向右(机械手把工件装到深孔镗床的卡盘上)→手指松开(原位)。
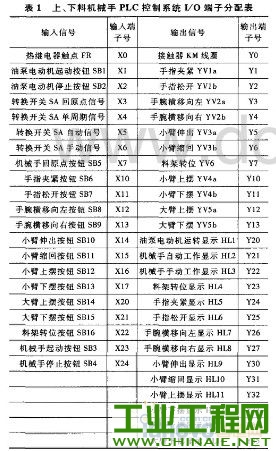
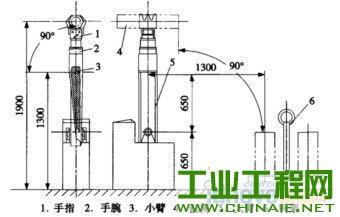 图l1上、下料机械手外形结构及料架配置 (2)上、下料机械手的主电路 电动机M为油泵电动机,机械手工作时必须先起动油泵电动机M,提供压力油使液压系统操作电磁阀驱动机械手动作。由热继电器FR进行长期过载保护,通过变压器向信号灯提供6.3V交流电。 (3)上、下料机械手的工作方式 上、下料机械手有手动、回原点、单周期(半自动)和自动四种工作方式,由选择开关SA进行选择。开关扳到自动位置,按起动按钮,机械手按顺序自动工作,完成一个上下料自动循环后机械手停下来处于原始位置。此时,深孔镗床开始进行加工,加工完毕,机械手又重复上述动作。 (4)上、下料机械手的液压系统 上、下料机械手的各个运动部分均由液压系统直接驱动,动作顺序通过控制液压系统的电磁阀来实现。 2 I/O端子分配 按照机械手控制和工艺流程的要求,确定PLC的输入信号有21个,输出信号有26个。根据I/O端子的数量和种类,选择FX:-32MR基本单元和FX,32ER扩展单元,PLC的I/O分配如表1所列。
 3 绘制状态流程图 上、下料机械手在自动工作时各个动作为顺序动作,完成一个动作后自动转到下个动作,所以在程序设计时采用功能图法,用步迸指令实现状态与状态之间的自动转换,状态流程图如图2所示。
 图2 上、下料机械手自动循环控制状态流程图 4 设计梯形图 机械手控制的全过程包括初始化、手动、回原位等控制内容。 (1)初始化程序 在初始化程序中,设置了机械手初始状态和原点位置条件,运用功能指令FNC60(IST),通过辅助继电器M0-M7将不连续的输入信号转换为连续的输入信号。若机械手选择手动方式(X6=ON),则手动初始状态SO被置位,可以进行手动操作;若机械手选择自动或单周期方式,应先在手动方式或回原点方式下使机械手先回原点,然后是X5=ON(自动)或使X4=ON(单周期),自动进入自动方式初始状态,S2被置位,可进行自动或单周期操作;若开关SA在回原点位置(X3=ON),程序自动进入回原点初始状态,S1被置位,可进行回原点操作。 (2)回原点程序 上、下料机械手自动工作状态时,若机械手不在原始位置,先将转换开关扳在回原点位置,然后按回原点按钮SB5(X7=ON),则回原点程序自动进行,使机械手回到原始位置。回原位程序采用各电磁阀同时动作来完成,必须先起动油泵电动机,为保证能回到要求的原点位置。由定时器11D延时控制动作完成。 (3)手动方式程序 手动方式程序如梯形图3所示。S0为手动方式的初始状态,机械手各个动作均由点动按钮控制相应的电磁阀而实现。
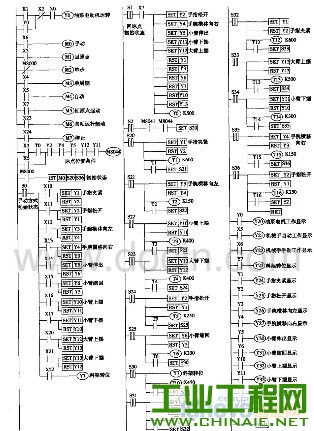 图3上、下料机械手PLC控制梯形图 (4)自动方式程序 在自动方式的状态流程图中,S2为自动方式的初始状态,特殊辅助继电器M8044和M8041的状态都在初始化程序中设定。机械手的各个动作顺序用步进指令控制,状态转换条件由各动作对应的定时器给出。 按起动按钮SB3(X23=ON),机械手从原始位置按动作顺序进行自动循环工作,当完成一次自动循环后,机械手重新回到原点位置,若机械手选择单周期方式,为第二次循环做准备。若选择自动方式,机械手自动进入第二次循环。 (5)其它方面 油泵电动机和机械手起动工作为顺序起动关系。油泵电动机停转时,机械手工作停止;但机械手停止工作时。油泵电动机仍运转。如图中初始化程序。油泵电动机停车或过载、机械手由自动工作方式转换为手动工作方式、或按下机械手停止按钮时,机械手均应停止工作。 5 结束语 PLC装置作为工业控制器,具有可靠性高、体积小、功能强等优点。应用PLC控制工业机械手实现各种规定的工序动作,可以在有害环境下代替人的繁重劳动,提高生产效率。当系统控制要求发生变化时,不需要改变硬件,只需重新编程。有利于扩展维护。同时,采用步进顺序控制编程,可使程序简化,便于调试,具有较强的可操作性和实用性。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

