|
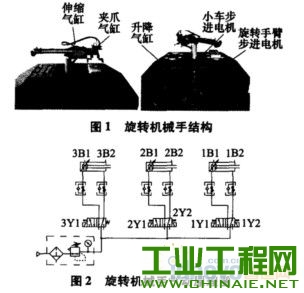
0 引言 机械手是一种能自动定位控制并可重新编程改变的多功能机器。它有多个自由度,可用来搬运工件么完成在各个不同环境中工作。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件。机械手系统最核心的部分是执行系统和控制系统,其执行机构一般由液压、气动或电机来完成。这里我们介绍基于FX系列的PLC来实现对自动生产线中四自由度旋转机械手的控制。 1 系统的组成及其工作过程 如图1所示,自动生产线中四自由度旋转机械手是由传送小车与三轴旋转机械手装置组成。它能完成进退、旋转、伸缩、升降动作。传送小车与传输轨道组成,采用有轨运行方式,作为各站的传送枢纽,三轴旋转机械手具有多工位旋转可伸缩可升降特点,通过中央控制系统进行有效合理的任务调度,也可单独进行手动调度。小车直线运行,能准确停到各工作站点,同时能对停靠各站进行上、下工件的取放操作;设有硬件急停功能确保系统设备安全。四自由度旋转机械手的执行机构是由气动与电机来完成。四自由度旋转机械手终端是1个气动夹爪,可以实现抓和放的动作,由1个双作用气缸和1个双电控电磁阀来完成控制;气动夹爪安装在1个水平方向的双作用气缸上,能实现伸出和缩回动作,方向的控制由1个双电控的电磁阀来完成;水平方向的气缸又安装在1个垂直方向的升降气缸上,能实现上升和下降动作,垂直气缸由i个单电控的电磁阀完成;机械手旋转是由直流步进电机驱动,传送小车的驱动是由交流步进电机完成。因此机械手的升降、伸缩及抓取分别由3个气缸完成,进退与旋转由2个电机完成。整个机械手的控制,是通过向系统提供符合要求的开关信号来实现的。系统的硬件主要由电气动驱动系统和PhC控制系统组成,软件系统主要通过PLC的编程实现。其气动系统原理图见图2a。
本机械手功能是将一边的工件搬到另一边,如将一条生产线的工件搬到另一条生产线,或将一个工作站的工件搬到另一个工作站,工作顺序为:(上电)→复位→(启动),前进到工作站点→顺时针旋转的90°→伸出→下降→抓工件→上升→缩回→逆时针旋转的90°→前进到Z作站点2→逆时针旋转的90°→伸出→下降→放工件→上升→缩回→顺时针旋转的90°→后退到原点斗循环。
2 系统的PLC控制设计 根据系统控制信号的数量,本系统选用FX2N-48MR型可编程控制器。可以结合实际的工程要求在工作现场调整控制程序,实现机械手的不同动作,实现了机械手柔性化设计。 2.1 机械手系统与PLC的I/O表(见表1)
 2.2 软件设计 机械手控制要求是:设复位状态为小车停在原点、仲缩气缸缩回、气爪放松、旋转机械手臂为零度方向。因此上电后复位就是需要传送小车后退到原点、缩回至后极限、放松气爪、旋转机械手臂为零度方向,特别是旋转机械手臂的初始位置要调整好,按下启动按钮后,传送小车前进,前进到_仁作站点1,到达位置后,机械手顺时针旋转90°,到位后机械手伸出至前极限,下降至下极限点,此处由个单电控的电磁阀完成,所以在一卜一个动作取工件时要保持下降,接下来的动作是机械手上升至匕极限,然后缩回至后极限,接着机械手逆时针旋转90°,抓住工件前进到工作站点2,机械手逆时针旋转的90°,伸出,下降,保持下降并将气动夹爪打开放工件,完成工件的搬运工作,接着机械手先上升至上极限,然后缩回至后极限,机械手顺时针旋转90°回到初始旋转位,然后传送小.车后退到原点。至此,气动机械手完成一个_仁作周期,可返回进行下一个循环。这里,我们注意到机械手都要在缩回后再旋转,这时为了避免悬臂梁过长而造成干涉或者机械的笨重。 传送小车的进退及机械手臂的旋转不是由气动元件驱动而是由步进电机驱动的。步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。PLC控制步进的控制指令[ DPLR D1 D2 D3 Y0]。PLSR指令是脉冲输出指令。针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速。指令中由D1设定最高频率,由D2设定总输出脉冲数,由D3设定加减速时间,第4个参数为输出端(机械手臂Y0/传送小车Y1)。传送小车前进YDp3=1;后退YOf33=0;传送小车移动的距离所给脉冲个数和位置开关来控制。旋转手臂逆时针旋转Y2=1;顺时针旋转:Y2=0;手臂旋转的角度由脉冲个数来决定。 PLC控制程序的功能图见图3,将此功能图、转换为梯形图,就可以成为PLC控制程序,从而实现对本气动机械手的动作控制。
 图3PLC控制图 梯形图的设计:梯形图的编制方法很多,可以用起保停的方法,即按条件起动然后保持(自锁),下一个状态成立时切断上一个状态,也可以使用置位[SET],乙和复位[RST]来完成,比较典型的是以[STL]为特征的步进梯形图。如果要精简一些,我们也可以用移位指令来完成,如本例可以用[SFTL M50 M0 K19 K1 ] ,其中SFTL是左移位指令,M5f1是补位的,M}是起始状态继电器,K19表示共19个继电器,即MO一M19,KL表示每次一位。部分程序如图4。其中[ZRST M1M18]是区间复位指令。I3PISR是脉冲输出指令。
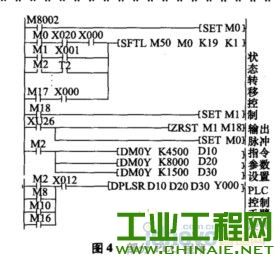 图4部分PLC程序 3 小结 总之,通过采用PLC对自动生产线中四自由度旋转机械手进行控制,实现了系统控制要求。控制程序具有较强的抗干扰能力,良好的可靠性,具有良好的协调运行性能。 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1