|
0.引言 近年来,在各项基础设施及民生工程项目建设中,为增加项目建设过程中的透明度,防范、制止工程领域的腐败行为,国家已经将工程审计列入政府投资项目必需的监督程序中[1]。以往的工程审计往往采用竣工后的事后审计方式,但很多问题已经被各种资料掩盖,很难从根本上预防和制止这些腐败行为,因此,亟需将工程建设的事后审计转变为由事前、事中、事后相配合的跟踪审计,在三者统一进行中实现审计价值。 工程建设项目 跟踪审计是由专业的审计机构与审计人员采用各项独立审计技术进行的实时审计,是按国 家 有 关 法 律、法 规 和 制 度 规 范 审 查、监督、分析及评价工程建设项目从投资立项到竣工交付使用全过程的真实性、合法 性 和经济性的手段。跟踪审计是对传统审计的发展与延伸,它充分发挥了审计工作在工程建设中的监督作用,成为当前工程建设领域进行工程审计的有效方式[2]。目前这种审计方式已在各个行业得到了广泛实践和应用,并得到社会各项机构认可,发挥着巨大的社会价值。 笔者在多年的 工程审计实践中也深切感受到现代科技给审计工作带来的很多便利:它大大提高了审计效率和准确度。例如,以往我们现场审计测量装修层高均采用钢尺丈量的方式,审计测量道路长度采用皮尺丈量方式,而现在均采用全站仪进行测量。当然以上变化仅仅是工具上的进步,审计计算方法和手段仍没有跟上现代科技发展的脚步[3]。近期笔者在南京市某保障房的跟踪过程中采用了全站仪与专业土方计算软件相结合的方法,取得了较好的使用效果。 项目位于南京市幕府山下,整个项目所测23栋小高层均依山而建,原山坡高 低 错落,地 形起伏较大,需要平整后再开挖,预估土方数量在20万 m3。土方施工单位经公开招标进场后,首先对土方数进行了确认。但是在和 跟踪审 计 人员多次 现场查看后认为,若采用传统方格网法和平均断面法均无法准确计算土方数量。而 作为监理 单 位和审计单位也均没有专业测绘仪器和数据处理方法对此加以计算。因此审计建议 政府聘 请 专业的测 绘单位配合跟踪审计,采用高精度测量机器人进行现场原地面三维数据自动化采集,并在专业测绘软件上进行数据预处理和计算,最终形成直观的地面三维模型和工程量,为工程审计的结算数据提供科学依据[5]。 1.测量方法
1.1三维数据自动化采集 测量机器人以其 高 精度、自动 寻 找、识 别 和 精确照准目标等优点,在测量工程中应用广泛。全站仪免棱镜测量在工程测量项目中已有大量应用,然而采用测量机器人在免棱镜模式下进行自动化测量的研究和应用还比 较 少见。特 别 是在土石方测量项目中,大多数建筑项目场 地 条件相对 较 好,植被覆盖量相对较小,自动化应用有较大发展空间。 本项目使用1 套 Leica TS50(0.5″,0.6+1mg/L)测量机器人(Georobot),应用南京市测绘勘察研究院有限公司研发的自动测量操作系统控制测量机器人,实现其在免棱镜模式下进行场地地表三维数据自动化采集作业,并通过自动化测量系统进行 数 据 采 集 和 数 据 通 讯 管 理 (如 需 要)作 业。项目允许多台测量机 器 人协同作 业。该 自动化测量软件已经过大量理论研究和实践工作,在投入生产项目前 也 进 行 了 大 量 测 试 和 试 验,系 统 稳 定 可靠,精度满足项目要求。 该土方工程外业测量工作步骤如下。 (1)控制测 量。在 场地设置若干控制点,覆盖整个测量范围。 (2)打开自动测量软件,进行全站仪设置及定向操作,设置仪器参数。 (3)在软件中输入或导 入场地边界点坐标,确定测量范围(根据以往研究和类 似项目经验,边 界线离测站不宜超过300m),或直接测量此坐标。 (4)设置碎步点采样间距(本项目为5m)。 (5)开始自动测量,自动 测量期间可以通过手动停测进行人工和自动测量之间的切换。 (6)自动测量完毕后可查看完成率,如完成率低于要求,可进行人工补测或换测站进行自动补测。 (7)执行第(2)步进行换站测量,软件将提示是否补测上一测站未完成采样点。如选择补测,补测点将纳入到本测站的采样点中。 (8)循环执行(2)—(6)步,达到要求后结束测量工作。 采用测量机器 人进行土石方量自动化测量优点有:①节省人力和测量时间,操作方便快捷;②测量数据均匀,减少了人为操 作引起的误差;③ 场 地条件良好时可以在夜间进行作业。其缺点有:①对场地条件要求高,在植被覆盖较多或地形变化较大的区域实 施 困 难;② 地 形 特 征 点 需 要 手 动 进 行 测量,对采样要求高时,自动和手动切换较频繁。 1.2土方计算 在土石方工程中,土石方量计算的方法一般有断面法、DTM 法、等高线法、方格网法等,其计算原理不同,各有优缺点。在实际工作中,应根据计算区域地形地貌的实际情况来选择计算方法。方 格网法是一种很好的检核方法,广泛应于各种地形条件的土石方工程项目。场地 地形坡度平缓的大面积土石方工程采用方格网 法最 为合适。根据 本 工程项目场地条件,本次审计工作采用5 m 方格网法进行土方核算。 方格网法通常 将工程场地划分为若干方形格网,在方格网各点标注场地设计标高和自然地面标高。施工挖方或填方由场地设 计标高与自然地面标高的差值表示,标 注于方格网各点上,计算方格网中每方格对应的填挖方量,并由所有方格的填挖方量计算场地挖方以及填方的总方量。 在计算整个项目场地挖填方量前需先确定“零线”的位置。零线即为场地的设计高度线。零线的施工高程为“0”,便于区分挖方区与填方区。通常零线由如下方法确定:用插入法在一挖一填的相邻方格网点的方格边线上求出零点位置,将每个相邻零点连接起来即为零 线。确定完 零 线后进行土方量计算。当采用三角 棱柱法 进 行方格网 土方计算时,该计算公式根据立体 几 何原理严 密 推 算而来,结果精确度高。 2.工程数据计算与分析 在外业实施全过 程 中,自动化测量运作稳 定,运行良好,数据采集满足项目要求。外业工作结束后,应采用专业土方计算软件进行数据处理及分析。 2.1数据模型建立 该项目采用测绘专业软件 CASS7.0进行方格网土方量内业计算。 将 外 业 自动 测 量 数 据 导 入CASS7.0中进行数据处理(图1)。 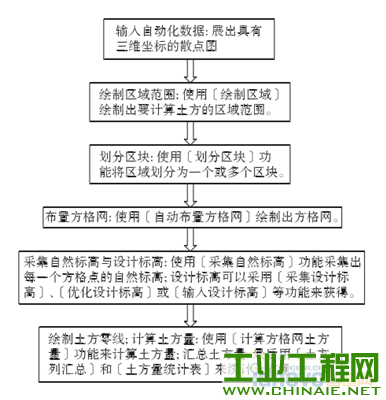 图1 方格网土方量计算流程图 2.2数据模型建立
2.2.1原地面高程模型 在进行该地块测量工作进场时,一标段已经在施工,原始地面已经被破坏,使用 的 是拆迁前地形图上的高程(甲方提供)。二、三标段在计算土方量时使用3月份甲方实测地形图上高程。一标段模型在地形图(甲方提供)基础上对图内陡坎及地形变化较大的地方进行高程加密,采用 CASS7.0对地形图进行建模[4]。 2.2.2基坑设计高程模型 根据甲方 提供的该 地块建筑 图 纸进行建模,5栋、10栋、15栋建筑根据图纸基坑深度算至每栋建筑±0 以 下 3.5 m,绝 对 标 高 分 别 为 32.5 m、33.5m、34.5m。6栋根据图纸基坑深度算至建筑±0以下7.1m,绝对标高为31.9m。11栋、16栋根据图纸基坑深度算至建筑±0以下6.9m,绝对标高为33.1 m、34.1 m。7栋根据图纸基坑深度算至建筑±0以下6.8 m,绝对标高为35.2 m。12栋根据图纸基坑深度算至建筑±0以下6.6m,绝对标高为36.4m。17栋根据图纸基坑深度算至建筑±0以下3.4m,绝对标高为40.6m。1号车库根据图纸基坑深度算 至 建 筑 ±0 以 下 4.2 m,分 别 为 32.7 m、33.7m、34.7m、36.0m、37.0m。按照1∶1比例放坡进行设计[6],采用 CASS7.0对设计图进行建模。 2.3土方量计算成果 采用 CASS7.0用5m 方格网法根据各标段开挖范围,将原地面 高 程 模 型 与 设 计 基坑高 程 模 型进行 比较得出填挖方量,部分计算结果如下(图2)。 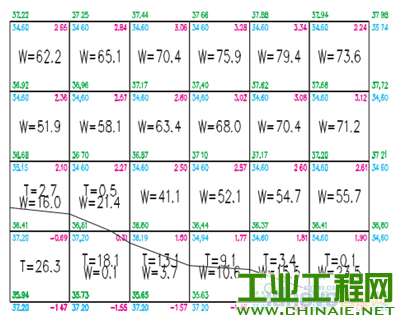 图2 某地块经济适用住房一标段土方预算5m 网格图(部分) 该地块一标段面积约为4.5 m2,净挖方约25.5万 m3(表1)。 表1 某地块经济适用住房一标段土方预算表  3.结语 (1)土方量的审核因工程场地不规则、地形复杂等因素长期影响审计工作的进行,选择合适的审计方法显得尤为重要。 (2)本文在生产实践的基础上,通过 具体的工程实例介绍了测量机器人在土方 工程审计中的应用,大大提高了外业生产的作业效率,并有效减少了内业计算中产生 的错误,成果可靠,适合在其他类似项目广泛采用。 |

 /2
/2 






