|
智能拖地机器人,云鲸 NARWAL 0.引言 并联机器人具有刚度高、承载能力强以及模块化程度高等特点,广泛应用于航空航天、国防军事等领域.然而,由于并联机器人的工作空间小、容易产生奇异位型等缺点,在实际生产中往往通过引入冗余驱动的概念去解决这些问题.高速、轻型化是并联机器人发展的主要趋势.然而,当轻型化的机器人在重载且高速的环境下工作时,往往会由于各个分支的弹性变形影响其运动及动力学性能,从而降低机器人的精度.因此,有必要对并联机器人进行弹性动力学分析,并通过结构优化提高其动力学特性.Liu 等[4]通过考虑连杆的变形,分析了并联机构的动力学特性. 胡俊峰等提出了一种简单而精确的弹性动力学建模方法,并通过实例进行了验证.文献分别针对不同的机构建立了弹性动力学模型,并且进行了相应的动力学分析.陈修龙等[10]基于机构的弹性动力学模型提出了一种优化方法.CammaraGta 等提出了一种约束优化方法,该方法改善了3T1R 并联机器人的弹性动力学性能;Alberto等采用一种新的重力补偿方法,分析了四杆机构的弹性动力学特性;Zhang 等以3-PRS 为例,通过建立其弹性动力学模型提出了一种能够分析其关节约束反力的方法.文献分别从结构、理论方法以及控制的角度对3-PRR 柔性并联机器人进行了深入的分析.综上所述,现有文献大多针对非冗余驱动并联机构进行弹性动力学分析,而对于冗余驱动并联机构的分析并不多.Zhao等比较了6-PSS 与8-PSS冗余驱动并联平台的弹性动力学特性.除此之外,鲜有文献对冗余驱动并联机构的弹性动力学进行研究,对于通过将主动副代替被动副从而实现驱动冗余机构的相关研究更是鲜有报道. 本文对5-UPS/PRPU 冗余驱动并联机构的弹性动力学性能进行了分析.首先通过结合子结构法和有限单元法,建立了空间单元的弹性动力学模型;然后根据各个关节的运动特性,将单元动力学模型进行组装,并根据机构的运动学/动力学约束,得到系统总体的弹性动力学模型;最后以相应的5-UPS/PRPU 冗余驱动并联机床为算例,通过与相应的5-UPS/PRPU 非冗余驱动并联机床动平台中心的弹性位移进行比较,证明冗余驱动对机床性能的改善. 1.动力学建模 5-UPS/PRPU 五自由度冗余驱动并联机床如图1 所示,它由定平台、动平台以及6 条驱动分支等组成.机床的加工运动可以通过5 条结构相同的UPS 驱动分支及PRPU 分支(冗余分支)的移动副共同实现.各个移动副的运动主要通过滚珠丝杠/螺母实现.此外,沿动平台中心的法线方向的转动被PRPU 分支所约束,因此,PRPU 分支也可以称为约束分支.R、U、S、P 分别代表转动副、虎克铰、球副以及移动副.由于机床动平台能够实现运动的自由度数目是5,而驱动数目为6,故机床表示为5-UPS/PRPU 五自由度冗余驱动并联机床. 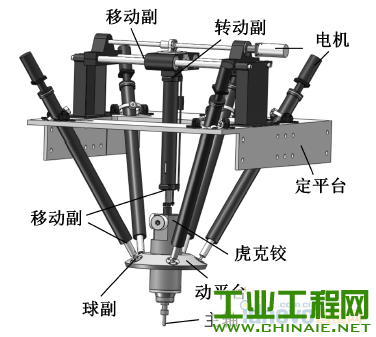 图1 5-UPS/PRPU 机床模型结构图 机床结构简图如图2 所示.对于该冗余驱动五自由度并联机床,由于机床动平台以及定平台刚度很大,故忽略其弹性变形,在此假设其为刚形体;由于滑块刚度很大,同样将其考虑成刚体,忽略其弹性变形.因此,在本文分析过程中考虑5个UPS 驱动分支的弹性变形;另外,将PRPU 分支的RPU 分支部分视为弹性体. 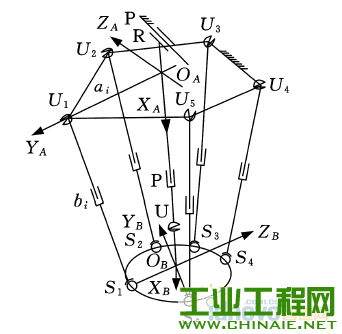 图2 5-UPS/PRPU 机床结构简图 1 .1 单元动力学方程 根据机床分支实际结构,将空间柔性梁单元模型等效为圆柱形截面,如图3 所示.该空间两  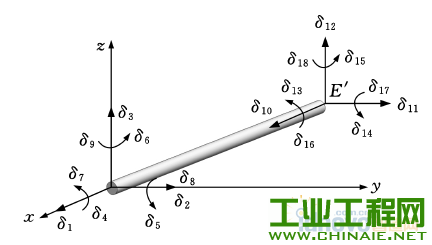 图3 空间柔性梁单元模型   1 .2 分支及动平台的动力学方程 首先分别将UPS 分支以及PRPU 分支等效为悬臂梁.对于PRPU 分支,则将R 0 点考虑为固定端,故其弹性位移及转角均为0;对于P 0 点,由于该点(移动副)链接的两个单元分属不同的构件,故应当设置不同的弹性位移;对于U 0 处(虎克铰)可以等效成两个汇交不共面的转动副,所以,U 0 处对应的两个曲率也为0.对于UPS 分支,同样将U i (i = 1,2,......,5)点考虑为悬臂梁的固定端,那么其弹性位移及转角均为零;由于P i 点连接两个不同的构件,故也设置不同的弹性位移;对应S i 处为球铰,因此,沿三个方向的曲率也为零.各个分支的系统坐标系设置如图4 所示. 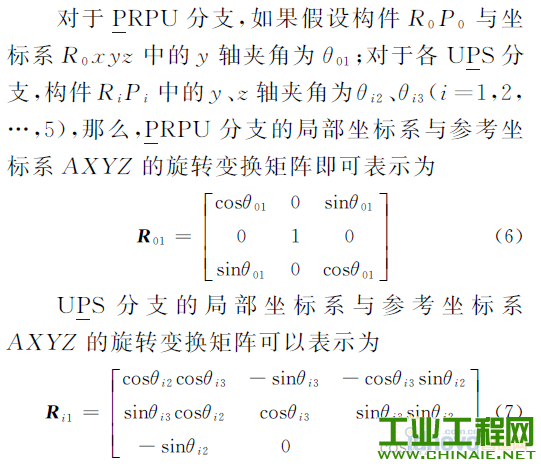 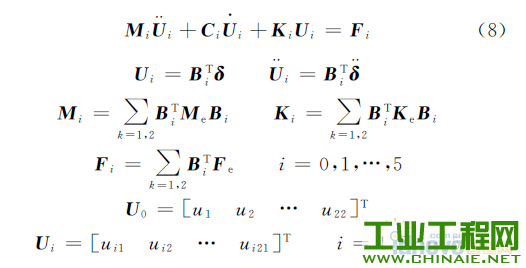 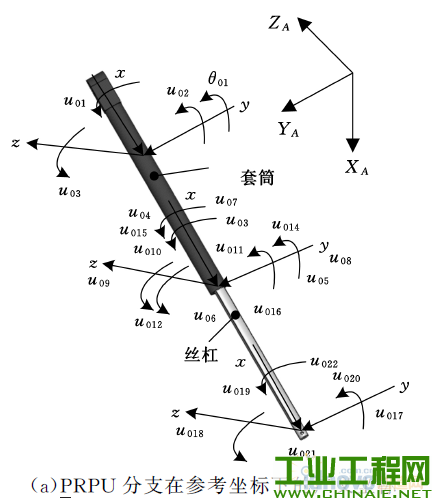 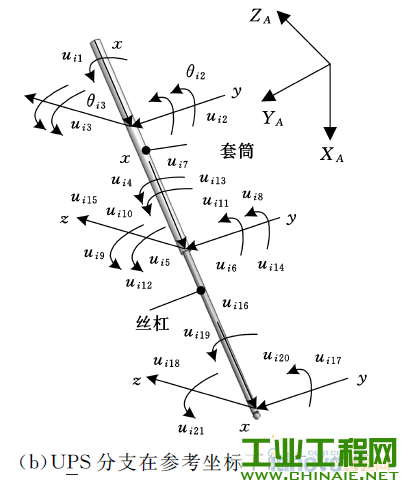 图4 分支在参考坐标系下的广义坐标 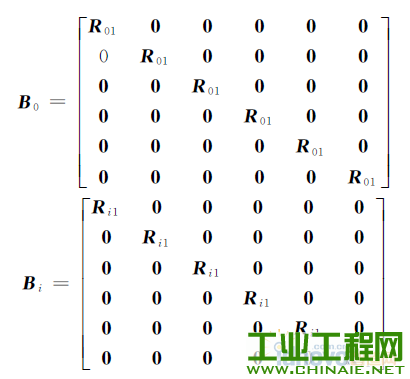 其中,M i 、K i 、F i 分别为分支的质量矩阵、刚度矩阵以及分支所受的外载荷向量.U 表示由各个分支在参考坐标系中的坐标所组成的向量. 1 .3 动平台动力学方程 根据前文的假设,由于动平台的刚度很大,故考虑成刚体,则动平台与各个驱动分支连接结点不是独立的.因此,假设动平台与各个驱动分支连接结点一致,且各驱动分支对动平台的力与作用在动平台的外力相平衡,由此可以分别得到系统的运动学约束方程及其动力学方程.根据对动平台的动力学分析作为系统的动力学约束,有  1.4 系统动力学方程的装配 将分支系统中的质量矩阵、刚度矩阵分解成以下形式:  通过将各个分支动力学方程(式(8))与动平台动力学方程(式(9))结合,再结合文献-中的运动约束方程即可得到5-UPS/PRPU 冗余驱动并联机床整体弹性动力学方程: 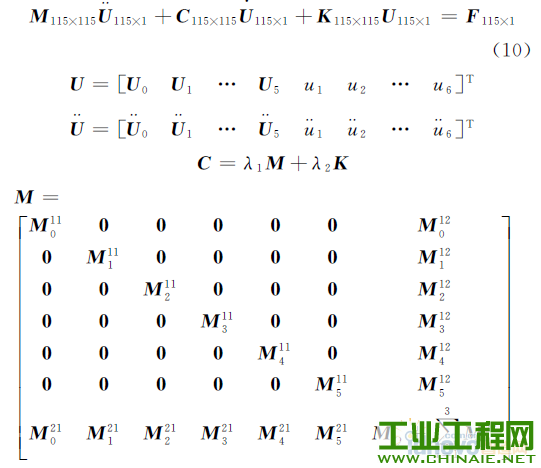 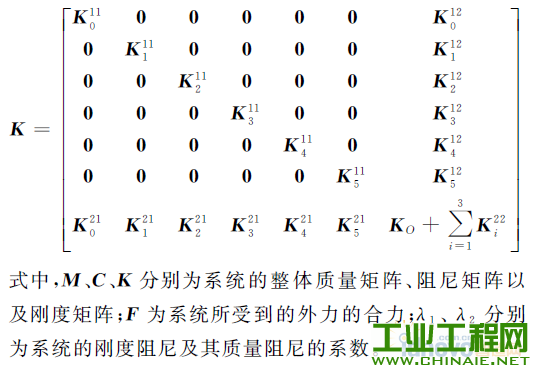 构造冗余驱动并联机构的方法有三种:① 将被动运动副替换为主动运动副,即关节式的冗余驱动;② 支链式的冗余驱动,即通过添加一条或多条驱动支链从而使机构的实际驱动链数目超过其运动所需的支链数目;③ 以上两种方法的综合.5-UPS/PRPU 冗余驱动并联机床属于第一种类型,即通过添加冗余电机从而构造出冗余驱动.值得注意的是,冗余电机的添加,使得整个系统具有6 个驱动输入.理论上而言,机床的任意位姿都对应着无穷多组解.因此,在确定各个分支的驱动力时,允许根据不同的优化目标通过采用不同的优化算法优化机床分支的驱动力.考虑到实际的加工问题,本文采用文献中的优化方法,根据达朗伯原理求解冗余分支的驱动力,从而以使冗余分支的大滑块能够更好地跟随动平台运动为优化目标.另外,对于非冗余驱动并联机床的驱动力,则可根据拉格朗日方程直接求出.机床刚体动力学的部分不再赘述. 2.动态响应分析 2.1 机床动态响应特性分析 为了分析系统的动态响应特性,令5-UPS/PRPU 五自由度冗余驱动并联机床的动平台中心的运动轨迹为 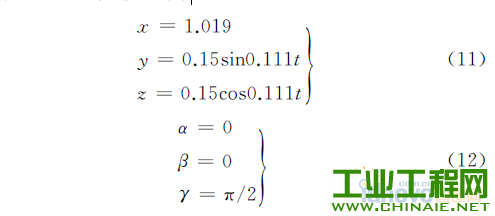 表1 机床基本结构参数 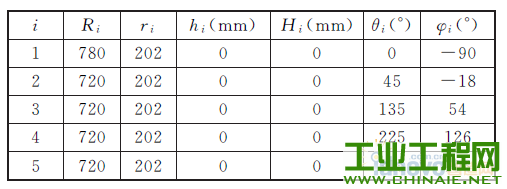 表2 UPS 分支基本结构参数 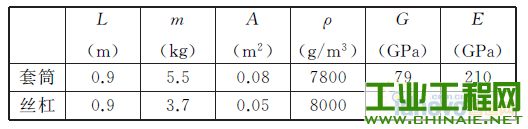 表3 PRPU 分支基本结构参数 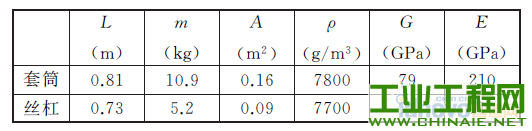 动平台的质量为45 kg, 密度为7800kg/m3 ,剪切弹性模量为79 GPa,拉压弹性模量为210 GPa.为了比较机床在冗余驱动与非冗余驱动的动态响应特性,分别计算了5-UPS/PRPU 冗余驱动并联机床与其相应的5-UPS/PRPU 非冗余驱动并联机床动平台中心的弹性位移以及对应的刚性位移.如图5~图10 所示,实线部分表示冗余驱动并联机床动平台中心的弹性位移,虚线部分表示非冗余驱动并联机床动平台中心的弹性位移. 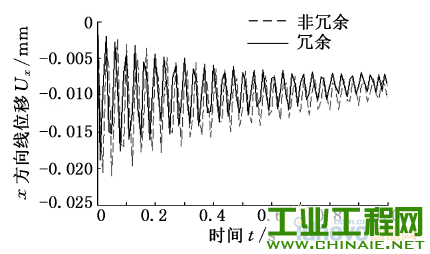 图5 沿x 轴方向的线位移 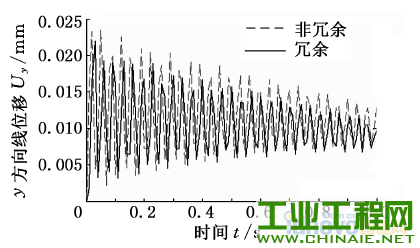 图6 沿y 轴方向的线位移 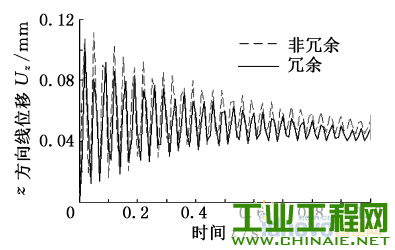 图7 沿z 轴方向的线位移 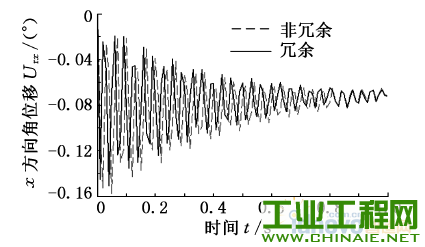 图8 沿x 轴方向的角位移 比较分析图5 ~图10 可知冗余驱动对机床整体动态响应的影响情况.对于冗余驱动并联机床,由分支变形引起平台中心在x 、y 、z 方向的线/角位移的最大误差值分别为-0.0189 mm、0.0219 mm、0.1008 mm;- 0.1507°、0.1361°、 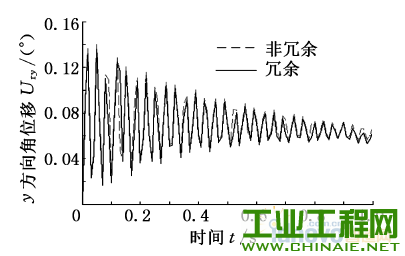 图9 沿y 轴方向的角位移 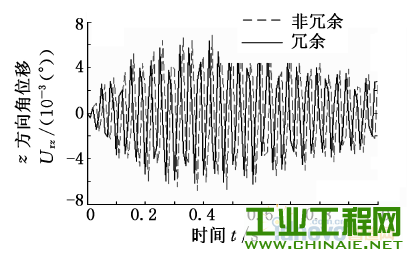 图10 沿z 轴方向的角位移 0.0064°.而对于非冗余驱动并联机床,各个方向的最大误差值分别为-0.021 mm、0.0236 mm、0.1114 mm;-0.1581°、0.1403°、0.0068°.由此可见,无论是对于冗余驱动还是非冗余驱动并联机床,最大移动误差均沿z 方向,转动方向的最大误差值均沿x 方向.除此之外,可以看出该冗余驱动并联机床在x 、y 、z 三个方向的移动误差及x 、y 方向的转动误差均小于其非冗余驱动并联机床,且最大移动误差减小了0.0106 mm,最大转动误差减小了0.042°.因而可以得出冗余驱动可以改善机床的动态响应特性的结论. 需要说明的是,由于各个方向的实际位移均以某一数值为中心往复波动,说明其动平台中心点由于各个驱动分支变形所引起的弹性位移是以某一点为中心的弹性振动. 2.2 仿真验证 该冗余驱动并联机床的固有频率由下式得到: 通过观察式(13)不难发现,该机床的整体质量矩阵和刚度矩阵均与机床的位姿相关,因此,计算了机床在不同位姿下的固有频率,并通过有限元软件中的模态分析进行验证.图11 所示为机床在初始位姿时各阶固有频率在有限元仿真软件 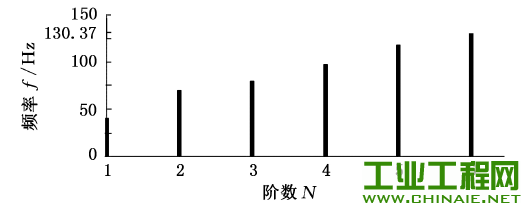 图1 1 冗余驱动并联机床各阶固有频率仿真结果 中的计算结果,比较分析可知,本文理论模型所得结果与有限元仿真结果的变化趋势一致,可以在一定程度上证明本文模型的有效性. 3.结论 (1)本文结合有限单元法与子结构法推导了5-UPS/PRPU 冗余驱动并联机床的弹性动力学模型. (2)比较了5-UPS/PRPU 冗余驱动并联机床与其非冗余驱动并联机床的动态响应特性. (3)冗余驱动可以在一定程度上改善冗余驱动并联机床的动态响应特性.此外,可以采用本文的方法对系统结构进行优化;通过理论分析找到机床误差最小的位置,从而进行轨迹规划,提高机床加工精度. 工业工程网 www.chinaie.net |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20


 /1
/1 


