|
0、引言 机器人的组成一般可分成3大部分,即:机械系统、控制系统和驱动系统。机械系统按控制系统的指令进行运动,动力由驱动系统提供。机械系统又叫操作机(Manipulator),是机器人的执行机构,一般可分为基座、机械臂、末端执行器。机械臂都是由连杆首尾相接,通过关节相联,构成一个开式链,机器人的控制系统和驱动系统在机器人的设计中固然极其重要,但作为其机械系统主要部分的机械臂的设计对机器人的控制性能同样具有重要的意义,对机器人的操作性能具有决定性的影响。 机器人的机械系统是一个强耦合非线性动力系统,其耦合性是由于机械系统首尾相接的链式结构及驱动器串联的配置特点决定的,因而是机器人设计中特有的问题,但由于耦合和非线性的影响,使机器人的动力性能变坏,动力学分析更为复杂,不利于机器人的动力学实时控制.如能部分抵消非缵l生和耦合的影响,不失为一种好的设计方法。本文所述即为利用关节驱动电机自身的质量进行平衡设计,部分抵消机器人动力系统耦合项的影响,减小驱动电机的负载,在作者们自行研制的YjP一1型双臂冗余度机器人机械臂的设计中取得良好效果。 1、基本原理 对于两连杆机械臂模型,如图l所示,0-、e。分别为连杆1、2的转角,M,、肌是关节的驱动转矩,m:为2杆质量,m0为末端负载,厶为2杆长度,c为2杆质心,k。为2杆质心到其支点的距离。其动力学方程为: 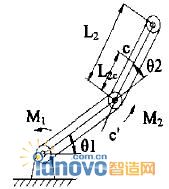 图1 如前所述机器人动力系统是一种非线性强耦合系统。上式中省略了向心项和哥氏项,因为在非高速运动情况下,向心项和哥氏项的影响较小,可以简化计算。式中^∽,.A z:8:是自惯量项,它表示角加速度s1,e2引起的作用在自身关节上的惯性力矩,At,A:是重力项的影响.它与臂杆的质量,质心离转动中心的距离以及位置角有关,A:t钆A。z6z为耦合惯量项,它表示由臂杆l或2的转动造成的对2或1关节的惯性力矩。耦合项的影响,使系统的动力性能变坏,使动力学分析更为复杂,因此,应尽量减小耦合项的影响,对于耦台项系数:A,:=A:-,其中其他一些项是由连杆自身质量和转动惯量引起的,从机械设计的角度看,要减小它们的影响,只有减小连杆自身质量和转动惯量及负载质量,但其质量和转动惯量不能没有。在耦台项系数里有一项为(m:L:,+moL:),因此,在减小质量的同时,如设法改变2杆质心的位置,使L2。=一(mo/m:)1.2,即(m:L2。+mo厶)为0,即可部分抵消非线性和耦合项的影响,从图1中可看出,厶。为负值,即2杆质心落到支点的另一侧,即c’的位置。 2、质量平衡原理在YdP一1型机器人中的应用 在YJP一1型双臂冗余度机器人的设计中,作者根据上述原理,利用关节驱动电机自身的质量进行平衡,对机械臂进行了优化设计。 YJP一1型双臂冗余度机器人单机械臂的机构原理简图如图2。 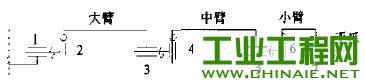 图2 对于1、3、5、7四个绕水平轴转动的自由度,由于负载在其转动轴线上,负载转矩较小,无需进行质量平衡,对于2、4、6三个绕垂直轴转动的自由度,承受负载转矩较大,用电机质量进行平衡设计。机器人末端负载设计参数为‰=0.5kg。 机械臂设计参数如表1。 表1 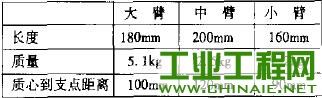 根据质量平衡原理,代入机械臂具体设计参数以及2、4、6三个关节驱动电机的重量,可计算出2、4、6三个自由度的驱动电机应分别安装在支点相对一侧的51mill、55mm、64mm处。这里需特别说明的是,在第一次设计时,各驱动电机都安装在转动轴负载的一侧,这样设计使电机负载转矩增大,也不利于减小耦合项的影响。采用质量平衡原理进行改进设计后,将2、4、6三个关节的驱动电机安装在支点另一侧伸出的燕尾槽内,通过齿轮减速带动机械臂转动,实验结果表明,改进后的设计明显减轻了驱动电机的负载,也减小了耦合惯量的影响。 实验是在其它自由度不动,只转动4、6两个自由度的情况下进行的。小臂和中臂的初速度都为0,以最大加速度到达最大的允许速度,然后作匀速转动。为便于比较,将臂杆在特殊位置上以特定参数运动时测出的所需驱动转矩列于表2中。e。、e:为4、6关节的角加速度,0-、0:为匀速转动时的最大角速度。表中的吖,、M:分别表示4、6关节所需总的驱动转矩,M,t、Mz 1分别表示重力项的大小,M_、慨_表示耦合项的大小,表中括弧内数据为没有进行质量平衡前的测量值。 由表中黼可见,由于采用了质量平衡技术,关节转矩中,重力项和鹃合项的影响都大为减小,约为质量平衡前的1/3,关节所需总的驱动蒋矩也相&蕊孙。由此可见,质量平衡的合理利胃,可以有搿洲口削负载转矩和耦台项的影响,对改善操作机的性能具有重要意义。 表2 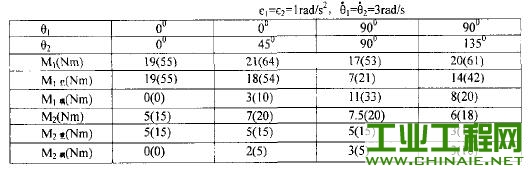 3、结束语 本文合理地运用了质量平衡原理,对YJP一1型双臂冗余度机器人的机械臂进行了优化设计,利用关节驱动电机自身的重量进行平衡,避免了附加平衡质量块使整个机械臂系统质量增大的不利影响。实验结果表明:这种改进设计,一方面减小了关节驱动电机的负载,另一方面也大大减轻了机器臂系统耦合惯量项的影响,使机械臂的动力性能和操作性能大为改善,是质量平衡原理的成功应用。 |

 /2
/2 






