|
1.引 言 随着人们生活、工作方式的改变,颈、腰椎间盘突出症已成为常见病症。近年来文献资料表明,将牵引治疗单独或综合应用于椎间盘突出症治疗,多数患者症状有较明显的好转或减轻[1],成为非手术治疗椎间盘突出症的首选方法。市场上现有的牵引设备主要有快速牵引和慢速牵引两种。快速牵引治疗的原理在于瞬间牵引使椎间隙增加,椎间盘内压下降,使突出物还纳减轻对神经压迫[2],但该类设备牵引力较大且瞬间释放,其治疗的适应症范围具有较大的局限性; 慢速牵引设备多采用小牵引力、多种固定模式、长时间持续作用的治疗方式[3],治疗过程中脊柱处于持续受力状态,脊椎两侧肌肉产生收缩抵抗,抵消了牵引力,在疗效方面尚不尽人意。近年来,国际上基于牵引治疗,提出“脊柱减压”治疗的概念[4],即牵引力以特定角度施加于脊柱病变部位并在治疗过程中实时调整,使脊椎两侧肌肉得到放松,允许椎间盘分离,椎间隙内产生负压,使椎间盘突出物吸收回纳的治疗方法[5]。我们采用“脊柱减压”治疗的概念,设计一款新型慢速牵引系统,选用伺服电机为动力源,把传感器测控技术和计算机控制技术运用到脊柱减压治疗系统中,实现牵引力的精确控制。 2.系统总体设计 系统主要包括四大功能模块: 人机交互及通信模块、核心控制模块、伺服动力模块、数据采集模块。该系统的总体结构见图 。 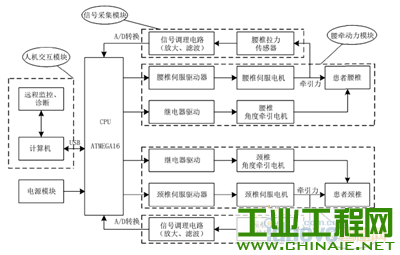 图 1 系统结构框图 2.1 人机交互及通信模块 系统采用 PC 机作为上位机实现人机交互功能。上位机根据输入的治疗数据运算并生成牵引力曲线、牵引角度等参数,通过 USB 通信将相应数据传送给微处理器,并将微处理器反馈回来的数据以曲线等形式显示出来,以客观显示与预设数值的拟合程度。另外,上位机还负责网络数据通信,将治疗数据存储于远程数据库中,能够实现大容量数据存储及访问。 2.2 微处理器核心控制模块 系统选用 ATmega16 单片机作为核心处理器。核心处理器将上位机传送来的治疗参数进行处理并发送指令,驱动执行机构动作,并通过读取传感器监测到的数据,实时对执行机构进行调整,确保实际牵引力、牵引角度等与预设数值保持一致,并将牵引力、牵引角度反馈到上位机界面进行显示。 2.3 伺服动力控制模块 伺服动力控制模块是系统实现治疗功能的关键执行部件,主要包括伺服驱动器、伺服电机、角度调节电机。伺服驱动器接受微处理器发出的运动指令,驱动交流伺服电机输出力矩,为系统提供精准平稳的牵引力; 角度调节电机改变牵引力的施加角度,确保系统以特定角度精准作用于病变部位,避免脊柱整体受力。 2.4 数据采集模块 数据采集模块主要有力量传感器、角度传感器、信号调理电路以及 ATmega16 单片机自 带的 A/D转换电路组成,实现多通道数据的采集和预处理。该模块通过力量传感器、角度传感器等实时采集设备运转过程中的牵引力、牵引角度等参数,并反馈给微处理器,以便系统及时调整设备动作。 3.伺服控制系统的设计 实现牵引力的精确控制、数据采集的精确度及反馈的实时性是交流伺服控制系统的主要目标。为了减少治疗过程中各种干扰信号及不确定因素的影响,提高伺服控制系统的工作精度,需要选用稳定性好、抗干扰能力强的伺服电机以及采样精度高、灵敏度好的传感器,并且通过 PID 控制提高整个系统的性能。 3. 1 伺服控制系统 伺服控制系统采用闭环反馈设计,主要由单片机、伺服驱动器、伺服电机、牵引力传感器等组成,见图 2。在各环节的协同作用下,实现牵引力的精准控制。 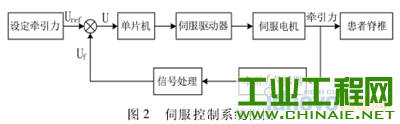 根据患者信息,上位机自动生成牵引治疗曲线,设定牵引力所对应的电压值即为系统的输入信号Uref; 治疗过程中,牵引力传感器实时测量牵引力的大小,经滤波、放大后得到的电压值即为系统的反馈信号 Uf; 反馈信号 Uf与设定电压 Uref经减法运算之后形成偏差,即误差信号 U = Uref- Uf。单片机对误差信号 U 处理后,输出控制信号,实时调整伺服电机的输出转矩,将动态随动的牵引力施加于患者病变椎段,从而形成伺服控制系统的闭环反馈设计。系统运行过程中,要求反馈实时准确地跟踪设定量,所以系统需要满足调节时间小、响应速度快的特点。PID 控制算法简单高效、参数可调,可以在实际运行中根据情况调节比例、积分、微分 3 个参数来达到较好的控制效果[6],所以我们将 PID 控制运用伺服控制系统中,以提高系统控制效果。 伺服控制系统 PID 算法原理图见图 3,系统将测得的电压信号与给定信号进行对比,根据偏差信号 U 的大小,计算出 PID 算法中所需的 PID 参数,最终得到准确的被控量牵引力 F。 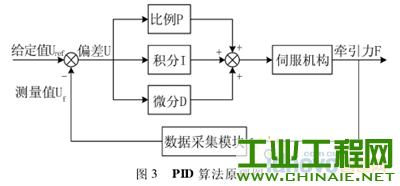 3.2 伺服动力机构的选择 治疗过程中牵引力实时跟随设定牵引力变化,并且根据肌肉抵抗力的变化迅速做出调整,避免产生椎旁肌肉收缩或痉挛,整个闭环伺服控制系统的控制目标是将动态随动牵引力精准施加于患者病变椎段。伺服驱动器可以使伺服电动机工作在速度模式、位置模式或者转矩模式。转矩模式下,通过不断改变伺服电机的输出转矩可以实现脊椎牵引力的实时动态控制,另外伺服驱动器采用强健性控制技术,使得伺服电机的低速特性更佳[7],更能有效运用于脊柱减压治疗系统。 经过分析和计算,系统选用台达交流伺服电机,通过设置伺服驱动器,使电机处于转矩模式。伺服驱动器接收单片机传输的牵引力信号,通过改变伺服电机的输出转矩,将动态随动的牵引力精准施加于患者病变椎段。 3.2.1 腰椎牵引机构 腰椎牵引机构的示意图见图 4,由安装在底座上的伺服电机 1 对滚珠丝杠 2提供扭矩,通过螺母 3 带动连接盘 4 牵引拉力传感器 6,生成的拉力促使牵引底板 7 带动绑带盘 5,从而达到腰椎牵引的目的。 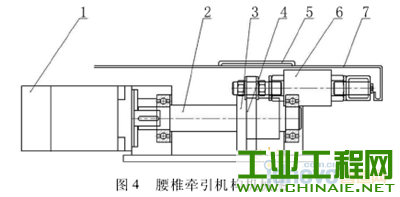  通过以上计算可知 T0 > T,选用该型号的伺服电机作为腰椎牵引机构,转矩可以达到控制要求。 3.2.2 颈椎牵引机构 颈椎牵引机构的示意图见图 5,由安装在底座 3 上的伺服电机 1 把扭矩传递给滚珠丝杠 4、通过螺母 5 转换成拉力,并经连接盘6 把牵引力传给拉力传感器 7,从而拉动头板 2 进行颈椎牵引治疗。 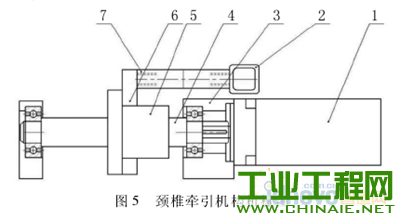 头板最大拉力 F = 25k g≈250 N,选用 2004 滚  通过以上计算可知 T0 > T,选用该型号的伺服电动机作为颈椎牵引机构,转矩可以达到控制要求。系统的脊椎牵引机构与颈椎牵引机构均为伺服电机直接带动丝杠,进而牵动胸板与头板以线性拉力的形式作用于患者脊椎,这种作用方式直接、反应快,可以迅速地调整牵引力。 3.3 ADC 采样 数据采集的精确度影响牵引力的跟踪精度,从而对整个伺服控制系统的精度和稳定性造成很大的影响。ATmega16 单片机的内部 ADC 采样精度可以达到 10 位,最大精度下可实现每秒 15 k SPS 的采样速率,可以满足伺服控制系统的要求。ADC 的工作电源由 AVCC 提供,AVCC 的稳定性影响 ADC 的转换精度,系统电源 VCC 通过 π 形滤波器接入 AT-mega16 的 AVCC 引脚,这样就能很好地抑制系统电源中的噪声,提高 AVCC 的稳定性。图 6 为 π 型滤波连线图。 4 系统测试结果分析 系统根据患者体重、身高、病痛部位等生成独特的牵引曲线,牵引曲线中的最小牵引力为最大牵引力的一半。治疗过程中要求牵引力实时跟随牵引曲线变化,我们通过临床实验对系统性能进行测试。 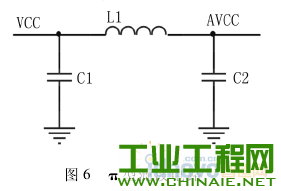 4.1 临床实验结果 我们选用 35 例腰椎间盘突出症患者接受脊柱减压系统的治疗,经过 5 ~ 6 周的 20 次治疗之后,有31 位患者疼痛症状得到不同程度的缓解,有效率可以达到 89% 。治疗过程中患者对治疗的耐受性较高,并且未发现不良反应。完成治疗后,对其中的25 位有效治疗患者进行大约半年的随访,超过 85%的患者腰椎状况维持或好于治疗结束时的状态,个别患者有复发趋势。从临床数据可以看出,脊柱减压伺服控制系统对于腰椎间盘突出等症具有较好的疗效。 4.2 牵引曲线 以体重 50 KG 的患者为例,系统生成的腰椎牵引曲线,最大牵引力为 200 N,最小牵引力为 100 N,患者的腰椎曲线治疗界面见图 7,上层曲线是根据患者信息生成的标准牵引曲线,下层曲线是治疗过程中生成的实际牵引曲线,从图中可以看出,实际牵 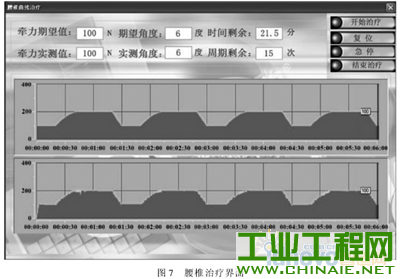 引力曲线与设定牵引力曲线拟合程度较好。图 7 中时间 00: 00: 45 处显示的是治疗过程中患者在床体上稍微移动造成的干扰,经过伺服控制系统的及时调整,系统输出的牵引力动态地跟踪设定值,牵引曲线很快恢复原定轨迹。结果表明,系统动态可控性好,能够较快的抵制干扰信号。 5.总结 本研究针对目前腰椎间盘疾病患者较多,而现有颈、腰椎牵引机构牵引精度低的问题,设计了一种基于“脊柱减压”的新型颈、腰椎牵引治疗系统,分析了系统的四大功能模块,并重点研究了相应的伺服控制系统,从伺服动力机构、数据采集、PID 控制算法等方面提高了伺服控制系统对牵引力的跟踪控制精度,并通过实验对控制效果进行了说明。实验结果表明,系统抑制患者干扰的能力和对牵引力的跟踪精度较高,治疗效果明显,从而验证了整个脊柱减压伺服控制系统的精度和可行性。 |
 /2
/2 







