|
日本东京大学教授石川正俊等开发出了即使不提前教会作业步骤,也能使工业机器人顺利完成零件组装和拧螺丝等动作的技术。该技术可以使工业机器人每千分之一秒确认一次位置,并调整动作。有了这项技术,调整生产线的作业步骤等将可以轻松完成。石川教授等正与多家企业共同推进研究,力争最快在1年后将这项技术推向实际应用。 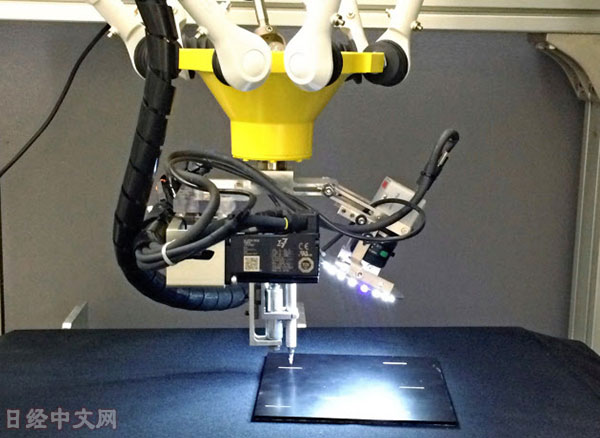 | | 通过对高速摄像机拍摄的画面进行快速分析,决定工业机器人的动作。 |
一般情况下,要想让工业机器人记住作业步骤,需要作业人员预先直接移动机器人的前端,或者利用控制器进行操作。在大量使用机器人的工厂,如果组装产品的规格等发生变化,需要停下整个生产线重新教给机器人工序等,费时费力。 由于生产线使用的工业机器人的动作速度很快,普通图像处理技术的速度难以跟上。新技术通过每秒可拍摄1000帧的摄像头的图像,确认零件的孔洞等目标位置。并通过高速计算如何移动机器人更好,进而调整移动方式和施力方式等。 在石川教授等进行的试验中,机器人准确反复完成了在开有直径2毫米大小孔洞的板上插拔像铁丝一样的棒状物的动作。 目前的工业机器人在长时间重复相同作业的工序中能发挥效果,但不适合短期内频繁变更作业内容。石川教授表示,“(利用新技术的话)如果是复杂的作业,可以省去大约一周的教学时间”。 |

 /2
/2 






