|
近年来我国人力成本的不断提高,用工荒越来越严重,制造业的生存和发展遇到不小的困难。发展智能制造技术,尤其是工业机器人技术,显得更加重要。2014 年中国新增机器人 5.6 万台,成为世界上最大的机器人。 作为电子爱好者,制作低成本的多功能机械手,不仅能够培养自己的专业兴趣,提高自己的专业知识,而且为迎接今后的自动化改造和机器人应用浪潮早做准备。 基于上述背景,本文介绍了“低成本多功能机械手”的制作方法,用百元成本,实现了机械手的 “绘图” 、 “搬运” 、“激光雕刻”功能,适合电子爱好者进行学习。
 功能介绍 ■ 1. 绘图功能 应用范畴:三维立体绘图、铣加工等。绘图功能的整体外观如图 1 所示。用旧的电脑光驱进行改造,作为该项目的 X、Y 轴,另用一个微型步进电动机作为 Z 轴,使其实现空间移动。画笔固定在 Z 轴电机滑块上。如图 2 所作者 / 滕今朝低成本多功能机械手 DIY
 ■ 2. 搬运功能 应用范畴:搬运、装配、仓储等。搬运功能的整体外观如图 3 所示。电磁铁、机械爪及电机如图 4 所示。
 机械爪的固定轴安装在托盘上,同时作为机械爪的杠杆支点。机械爪的运动轴安装在开合电机的滑块上。滑块上下运动带动机械爪闭合、张开。开合电机固定在托盘上。托盘可以被电磁铁带动,整体上下运动。 ■ 3. 激光雕刻
 应用范畴:激光雕刻、电火花加工、线切割加工等。搬运功能的整体外观如图 5 所示。具体方案
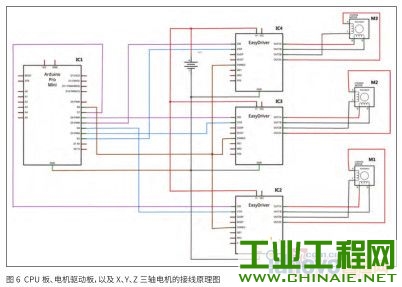 ■ 1. 电路部分 我们采用运行grbl 固件的单片机,arduino pro atmega328p 最小系统。CPU 板和下载板的价格很便宜,都是十几元。选用以 A3967 为核心的电机驱动板。CPU 板、电机驱动板,以及 X、Y、Z 三轴电机的接线原理图,如图 6 所示。 ■ 2. 硬件搭建 将两块旧的电脑光驱分别固定在两个塑料外壳上,并垂直安装,并用金属杆加固。如图 1 所示。利用光驱的步进电机作为该项目的 X、Y 轴。根据需要,安装 Z 轴微型步进电动机、电磁铁、机械爪、激光笔。电路板安装在塑料外壳背面。 ■ 3 . 软件使用 用 Arduino Builder 软件将 grbl 固件下载到 arduino pro atmega328p。软件的具体使用方法,很简单,网上有详细介绍,这里就不多说了。 用 ArtCAM 软件来设计运动路径,并进行保存。如图 7所示。grbl controller 上位机软件与嵌入了grbl 软件的arduino 单片机系统通信,解析数控代码。通 过 grbl controller 打开已经保存好的刀路文件,并实时与单片机通讯和监控。如图 8 所示。
 |

2020-02-17

2022-06-13

2021-12-13

2022-11-09

2022-10-20



 /1
/1 

