|
走进汽车生产企业,各种焊接机器人、装配机器人组成的生产线精准高效地运行。而在各大卖场,也可以看到琳琅满目的清扫机器人、机器人玩具等。机器人已从科幻小说和电影银幕里走出来,走近了平常人的生活。 机器人(robot)一词,最早出现在1920年捷克科幻作家恰配克的《罗索姆的万能机器人》中,原文作“Robota”,后来成为英文中通行的“Robot”。更科学的定义是1967年由日本科学家森政弘与合田周平提出的:“机器人是一种具有移动性、个体性、智能性、通用性、半机械半人性、自动性、奴隶性等7个特征的柔性机器。” 国际机器人联合会将机器人分为两类,工业机器人和服务机器人。工业机器人是“一种应用于工业自动化的,含有三个及以上的可编程轴的、自动控制的、可编程的、多功能执行机构,它可以是固定式的或移动式的”。服务机器人则是“一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从事生产的设备”。从定义可见,分类的标准是机器人的应用场合。 一般的机器人都由机械结构、控制驱动系统、感知系统、交互系统等部分组成。 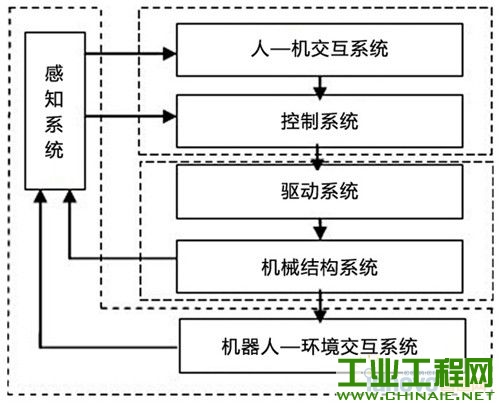 图1一般机器人的系统构成 近年来工业机器人供应量在大多数行业都呈现出上涨的态势。而服务机器人发展历史较短。其在功能上的主要不同体现在两个方面:一是与人的沟通协作;二是在复杂环境下代替人的部分工作。 一、发展现状 仿生机器人 “机器人”这个名称本身就带有仿生学色彩,目前已有不少类人机器人、机器狗等产品问世,这些产品大部分只具有娱乐功能。然而2013年底在美国佛罗里达州Homestead举办的DARPA机器人挑战赛则将仿生机器人推到了救灾救援的应用领域。该赛事设计了通过布满障碍物的门、崎岖路行走、破拆墙面、连接消防栓、转动阀门等八项比赛任务,吸引了来自世界各地的16支仿生机器人团队。从比赛任务的设置可以看出,比赛非常鲜明地突出了仿生机器人在救灾救援方面的应用。经过激烈的角逐,日本Schaft公司生产的HRP-2机器人最终夺魁。来自弗罗里达的一家非盈利机构和卡耐基-梅隆大学分获二、三名。值得一提的是,Schaft机器人已在早些时候被Google收购,而第二、四名团队所用的Atlas机器人也来自Google旗下的BostonDynamics。作为世界上最具创新实力的科技公司之一,Google的收购行为也表明了仿生机器人具有一定的市场前景。 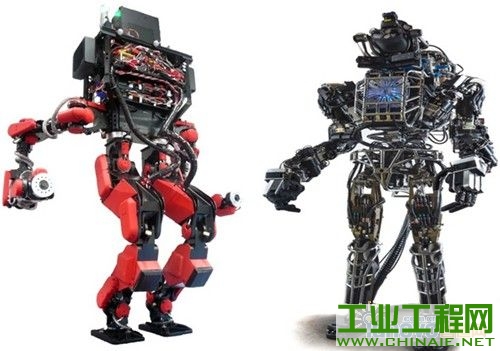 图2HRP-2机器人和Atlas机器人 机器人在救援救灾方面,与人类相比具有巨大的优势,可以极大提高搜救效率和减少人员伤亡。但同时,从该赛事也可以看出,所有的机器人在比赛中都出现过故障,甚至有3支代表队最终得了零分。即使完成比赛,机器人的动作也显得呆板迟钝。这些都表明目前的仿生机器人技术还不成熟,具有很大的发展空间。 无人驾驶汽车 除机器人挑战赛外,DARPA还分别于2004、2005和2007年举办过3届无人车挑战赛,专注于轮式移动机器人,或者通俗地称为无人驾驶汽车。无人车除了能减轻驾驶员的疲劳外,更重要的作用在于缓解交通拥堵和减少交通事故。同时,无人驾驶汽车在军事上也可以发挥巨大的作用。无人车的发展得到了全球很多机构和公司的支持,其中典型的代表就是Google公司。Google公司继承了DARPA比赛中最优秀的团队,研发了广受关注的Google无人车,完成了数十万公里的道路测试,并获得了美国多个州机动车辆管理部门颁发的驾驶许可证,这意味着Google无人车已成为了交通参与者,而不仅是实验室的设备。这无疑是里程碑似的事件,它标志着无人车已经具备商业化的条件,同时也表明无人驾驶技术趋于成熟。 中国在无人车方面的研究也在如火如荼地开展。自2009年以来,国家自然基金委举办了5届智能车挑战赛。国内多家研究机构参赛,进行城区道路、乡村道路等比赛项目的角逐,展现了中国无人车发展的水平。其中,中科院合肥物质科学研究院研制的“智能先锋”号无人车,是唯一一支连续4年进入比赛前三名的车队。  图3中科院合肥物质科学研究院研制的无人车 纵观5届比赛,中国无人驾驶技术取得了突飞猛进的发展。以2013年在常熟举办的第5届中国智能车未来挑战赛为例,设置了通过路口、按照红绿灯及其他交通标示的指示通行、避让车辆、绕过障碍等多项具有一定难度的比赛项目。从这些项目的设置和参赛车队的比赛完成情况可以看出,国内的优秀无人车具备了在较复杂环境中自主行驶的能力,技术水平在某些方面已可以和国际先进水平媲美。 地外星球探测器 最为人熟知的地外探测器要数火星探测器和月球探测器了。世界上最早的火星探测器是前苏联发射的“火星1号”探测器。 月球是人类探测器最常光顾的星球。前苏联和美国是最早发射月球探测器的国家,从1958年开始,两国发射了大量月球探测器。1970年,月球车1号成功登月,成为第一个登上月球的机器人,拍摄了大量月球照片。而随后的月球24号探测器更是带回了月岩标本。 2013年底,中国成功发射嫦娥三号月球探测器,并释放玉兔号月球车。玉兔号成为第一个登上月球的中国机器人,完成了在月球表面行驶并拍摄照片的任务,并对月石、月坑等做了科学探测。玉兔号的经历与月球表面的地形一样,可谓“坎坷”。2014年1月25日,玉兔号进入第二次休眠期,原计划在2月10日唤醒,却因机构故障未能苏醒过来。正当人们以为玉兔号将长眠月球时,2月12日,玉兔号却全面苏醒,情况趋于好转。这也表明了我国自主研发的外星探测机器人具备了一定应对未知极端环境的能力。 二、民用机器人产业前景广阔 上述重大机器人项目的开展,有力地推动了机器人技术的发展,同时也进一步促进了民用机器人产业的壮大。 根据国际机器人联合会的统计,2012年全球专业服务机器人销量为16067套,销售额34.2亿美元。而个人及室内服务机器人的销量更高达300万套,比2011年上涨20%,销售额达到12亿美元。 该组织还预测,在2013-2016年间,将新增约94800套专业服务机器人,销售额将高达171亿美元。而在此期间,个人服务机器人的销售量将达到2200万套。 专业服务机器人主要应用于军事、户外作业、后勤保障和医疗等方面,分类销量如图4,数据来源于国际机器人联合会。 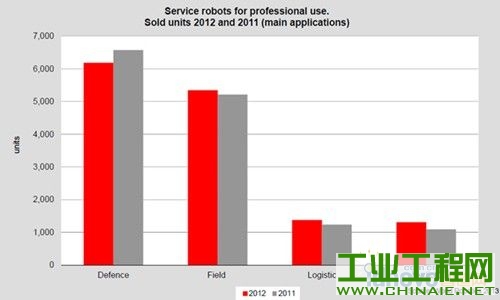 图4专业服务机器人分类销量 个人及室内服务机器人主要应用于家庭清扫、玩具、教育、老弱者护理等方面。其中家庭清扫机器人的销售量最大,预计2013-2016年间,销售将达1550万台。 中国的机器人市场相当广阔,据统计,2012年,中国已成为全球第五大工业机器人装备国,预计到2016年,中国的工业机器人装备量将超过韩国和德国,成为全球第三大工业机器人装备国。 我国的机器人需求量持续攀升,我国自主研发的机器人产量和技术水平已不能满足需求。因此在《国家中长期科学和技术发展规划纲要(2006-2020年)》中,明确指出将服务机器人作为未来优先发展的战略高技术,并制定了《服务机器人科技发展“十二五”专项规划》,以此促进我国机器人产业的发展。 因此我认为,在未来的10~20年间,中国的机器人产业必将迎来一个高速发展的新阶段。 机器人是一门多学科交叉的技术,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。因此,机器人领域中需要研究的问题非常多,而其中感知、定位和控制是机器人技术的三个重要问题。下面主要针对机器人中的环境感知、自主定位、运动控制等方面,简述其中的用到的一些技术。 三、环境感知 目前,在结构化的室内环境中,以机器视觉为主并借助于其他传感器的移动机器人自主环境感知、场景认知及导航技术相对成熟。而在室外实际应用中,由于环境的多样性、随机性、复杂性以及天气、光照变化的影响,环境感知的任务要复杂得多,实时性要求更高,这一直是国内外的研究热点。多传感器信息融合、环境建模等是机器人感知系统面临的技术任务。 基于单一传感器的环境感知方法都有其难以克服的弱点。将多种传感器的信息有机地融合起来,通过处理来自不同传感器的信息冗余、互补,就可以构成一个覆盖几乎所有空间和时间的检测系统,可以提高感知系统的能力。因此,利用机器视觉信息丰富的优势,结合由雷达传感器、超声波雷达传感器或红外线传感器等获取距离信息的能力,来实现对本车周围环境的感知成为各国学者研究的热点。 使用多种传感器构成环境感知系统,带来了多源信息的同步、匹配和通信等问题,需要研究解决多传感器跨模态跨尺度信息配准和融合的方法及技术。但在实际应用中,并不是所使用的传感器及种类越多越好。针对不同环境中机器人的具体应用,需要考虑各传感器数据的有效性、计算的实时性。 所谓环境建模,是指根据已知的环境信息,通过提取和分析相关特征,将其转换成机器人可以理解的特征空间。构造环境模型的方法分为几何建模方法和拓扑建模方法。几何建模方法通常将移动机器人工作环境量化分解成一系列网格单元,以栅格为单位记录环境信息,通过树搜索或距离转换寻找路径;拓扑建模方法将工作空间分割成具有拓扑特征的子空间,根据彼此连通性建立拓扑网络,在网络上寻找起始点到目标点的拓扑路径,然后再转换为实际的几何路径。 环境模型的信息量与建模过程的复杂度是一对矛盾。例如针对城区综合环境中无人驾驶车辆的具体应用,环境模型应当能反映出车辆自动行驶所必需的信息,与一般移动机器人只需寻找行走路径不同的是,车辆行驶还必须遵守交通规则。信息量越多、模型结构越复杂,则保存数据所需的内存就越多、计算越复杂。而建模过程的复杂度必须适当,以能够及时反映出路况的变化情况,便于做出应对。 四、自主定位 定位是移动机器人要解决的三个基本问题之一。虽然GPS已能提供高精度的全局定位,但其应用具有一定局限性。例如在室内GPS信号很弱;在复杂的城区环境中常常由于GPS信号被遮挡、多径效应等原因造成定位精度下降、位置丢失;而在军事应用中,GPS信号还常受到敌军的干扰等。因此,不依赖GPS的定位技术在机器人领域具有广阔的应用前景。 目前最常用的自主定位技术是基于惯性单元的航迹推算技术,它利用运动估计(惯导或里程计),对机器人的位置进行递归推算。但由于存在误差积累问题,航位推算法只适于短时短距离运动的位姿估计,对于大范围的定位常利用传感器对环境进行观测,并与环境地图进行匹配,从而实现机器人的精确定位。可以将机器人位姿看作系统状态,运用贝叶斯滤波对机器人的位姿进行估计,最常用的方法是卡尔曼滤波定位算法、马尔可夫定位算法、蒙特卡洛定位算法等。 由于里程计和惯导系统误差具有累积性,经过一段时间必须用其他定位方法进行修正,所以不适用于远距离精确导航定位。近年来,一种在确定自身位置的同时构造环境模型的方法,常被用来解决机器人定位问题。这种被称为SLAM(SimultaneousLocalizationAndMapping)的方法,是移动机器人智能水平的最好体现,是否具备同步建图与定位的能力被许多人认为是机器人能否实现自主的关键前提条件。 近十年来,SLAM发展迅速,在计算效率、一致性、可靠性提高等方面取得了令人瞩目的进展。SLAM的理论研究及实际应用,提高了移动机器人的定位精度和地图创建能力。其中有代表性的方法有:将SLAM与运动物体检测和跟踪(DetectionandTrackingMovingObjects,DATMO)的思想相结合,利用了二者各自的优点;用于非静态环境中构建地图的机器人对象建图方法(RobotObjectMappingAlgorithm,ROMA),用局部占用栅格地图对动态物体建立模型,采用地图差分技术检测环境的动态变化;结合最近点迭代算法和粒子滤波的同时定位与地图创建方法,该方法利用ICP算法对相邻两次激光扫描数据进行配准,并将配准结果代替误差较大的里程计读数,以改善基于里程计的航迹推算;应用二维激光雷达实现对周围环境的建模,同时采用基于模糊似然估计的局部静态地图匹配的方法等。 在地面上移动的机器人按移动方式不同,大概可以分成两类,一类是轮式或履带式机器人,另一类是行走机器人,二者各有特点。 轮式机器人稳定性高,可以较快的速度移动,无人车、外星探测器等都是典型的代表。大部分轮式或履带式机器人的运动控制可分成纵向控制和横向控制两部分,纵向控制调节移动速度;横向控制调节移动轨迹,一般采用预瞄-跟随的控制方式。对无人车来说,在高速行驶时稳定性会下降。因此,根据速度的不同需要采取不同的控制策略。在高速行驶时通过增加滤波器、状态反馈等措施来提高稳定性。 行走机器人稳定性差,移动速度慢,但可以跨越比较复杂的地形,比如台阶、山地等。与轮式机器人不同的是,行走机器人本身是个不稳定的系统,因此运动控制首先要解决稳定性的问题,然后才能考虑使其按既定的轨迹移动的问题。目前,主流的行走机器人控制方式有两种:电机控制和液压控制,二者各有利弊。电机控制机构相对简单,但负载能力有限;液压控制可以获得较大的负载能力,但机构复杂。 利用电机和轴承模拟人的关节,从而控制机器人稳定行走,是机器人控制通常的方式。运动控制一般是将末端轨迹规划与稳定控制相结合:首先规划脚掌的轨迹,再通过机器人运动学求解各个关节电机的旋转角。理论情况下,按上述计算得到的关节角能够保证脚掌轨迹跟踪,但实际环境中存在很多扰动,需要对关节角进行反馈校正,保证稳定性。稳定控制方法很多,其中一种简单而常用的方法被称为零力矩点(zeromomentpoint,ZMP)法。其特征是:通过检测实际ZMP的位置与期望值的偏差,闭环调整关节角,使ZMP始终位于稳定区域以内,从而保证机器人不会摔倒。 闭环控制要求各个关节快速响应外界的扰动,这对负载能力有限的电机来说是比较困难的。而液压系统的负载能力较高,因此具有更优秀的抗扰性能。例如BostonDynamics公司研制的Atlas机器人,在单脚独立的情况下,被外力从侧面击打,仍然能保持不倒。这其中虽然不乏先进的控制方法,但其液压系统的负载能力无疑是成功的有力保障。 五、发展趋势及面临的主要挑战 梦想为科技插上翅膀,随着科技的发展,在不久的将来,科幻小说中的机器人将真实地呈现在人们眼前。如前所述,未来的机器人将成为人类的伙伴,和人一起工作,共同生活。在一些人类不能去、不愿去的地方,都可以看到机器人的身影。 在危险环境中的应用和成为人们工作生活的助手是未来机器人发展的两大趋势。当然了,要让机器人真的像人一样工作,成为人的助手,还具有相当大的挑战性。 首先,需要解决机器人在复杂环境中的运动能力。DARPA的机器人挑战赛设置了所谓“复杂”的环境,但对于一个正常的成年人,这些环境根本算不上复杂;而从比赛的过程可以看出,机器人很难应对这些情况。这说明现在的机器人在复杂环境中的运动能力比人类差得太多。 其次,提升感知和决策能力。对无人车来说,速度快是主要特点之一。如何在高速运动时,对时刻变化的环境做出合适的反应,决定了无人车的安全性,也是无人车产业化的最大障碍之一。众所周知,机器感知和决策的方式完全不同于人类,人类的感知具有极强的选择性,先前景后背景、先动态后静态、先非常态后常态等原则,让人能够迅速地在复杂环境中发现目标。这种能力是非常值得机器人研究和效仿的。 总之,近年来市场对机器人的需求持续攀升,各国政府、相关研究机构和企业,都非常重视机器人技术的发展,投入了大量的资源,机器人技术的发展呈现良好态势。而机器人技术中的高精尖问题,更激发着全球众多优秀的机器人研发团队不断创新,开拓进取。我认为,在未来,机器人必将成为日常生活中必不可少的工具,带给人们更加舒适便捷的生活。
|

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

