|
当前,国内中小型家具喷涂企业,在实行家具喷涂作业时普遍采用人工手持喷枪作业的方式。在浙江省实行“机器换人”工程之际, 本文研制一套可以代替人工作业的机器人对家具进行喷涂。目前,国内外很多公司研制的喷涂机器人普遍采用手臂关节型机器人,该型机器人移动速度快,控制灵活,但这类机器人大多数采用专用控制器,控制结构封闭,维修复杂,购买价格高。为了能在中小型企业中应用普及,本课题小组设计了一款系统开放性好,控制简便,机械结构混合的喷涂机器人。 1 机器人结构分析与控制方案 1.1 系统机械结构 机器人主要应用于各式家具门的喷涂, 因此对机器人的机械结构设计以门喷涂实际需求为出发点。机器人主要任务是完成对门的两侧面和正面的喷涂, 对机器人关节灵活转动有一定要求。从喷涂精度,作业占用空间和喷涂灵活性等角度考虑,机器人采用五自由度活动关节,混合型机械结构的设计方案。混合型机器人兼具直角坐标型机器人作业精度高,性能稳定的优点,同时又具有关节型机器人动作灵活的特点。机器人以直角坐标形式呈现的三轴分别为X、Y、Z 轴, 关节型形式的两轴分别为P、R 两轴。其中X 轴负责跟踪喷涂对象的移动,Y 轴实行垂直方向的喷涂,Z 作为调节喷枪与对象距离的前后进给轴,P、R 轴用于喷枪360°的多角度协调定位。机器人本体通过控制器控制伺服系统带动五个机械轴实现整体运动, 使喷枪准确到达喷涂的适当位置。机器人系统机械结构示意图1。
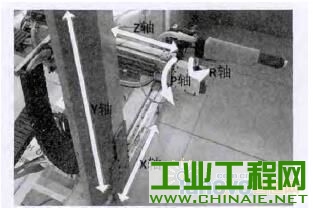 图1 机器人系统机械结构图 1.2 系统控制结构 控制系统以IPC+PLC 为控制核心, 实行上下两级控制结构。系统控制对象由两部分组成,一部分是机器人本体控制,另一部分是对喷涂对象的运动控制。五个机械轴臂由五个伺服系统驱动控制,五个伺服系统再通过PLC 自带的4 组高速脉冲输出和一个定位控制模块通过发送高速脉冲的方式控制。IPC 主要提供人机交互操作界面,设置参数,传送控制命令,监控系统运行等。PLC 作为系统的现场控制器,接受上位机传输的路径规划任务, 根据控制命令和传感器反馈信息对五轴的伺服电机实行位置和速度控制,使电机按预定轨迹和要求运动。喷涂对象的运动速度调节,由现场喷涂工艺要求决定。通过PLC 控制数字变频器驱动电机运转,再结合编码器信号反馈,实现喷涂对象的稳定移动。系统控制结构示意如图2。系统通过RS-485 通信数据线将IPC 和PLC 连接起来, 将IPC 的人机可操作性和PLC的优良控制性能结合起来,使之构成一个操控性强的控制系统。
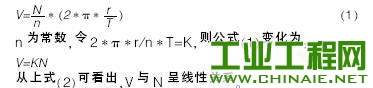
 图2 系统控制结构示意图 1.3 机器人对喷涂对象的跟踪 工业喷涂现场,往往实行流水线作业形式,喷涂对象以挂件形式跟随挂架移动。为了提高作业效率,需要机器人随喷涂对象同步运动。机器人跟踪喷涂对象的主要思路如下:移动挂件主要通过电机带动齿轮旋转移动, 光电编码器则负责检测电机运转速度, 编码器把测得的脉冲个数反馈给PLC,PLC 根据单位时间内计量的脉冲个数,计算出当前电机运转频率。根据电机的频率,PLC 向X 轴发送相应跟踪脉冲频率, 从而实现机器人跟踪对象喷涂的要求。现证明对象移动速度与编码器测得脉冲个数的关系。设对象移动的速度为V,齿轮半径为r,设在T 时间内,通过编码器反馈给PLC 的脉冲个数为N,n 为电机转过一圈的脉冲数。对象移动速度公式如下:
 2 控制系统硬件设计 2.1 主电路设计 主电路设计如图3 所示。主电路主要给各单元提供电源,设计时必须体现保护电路各模块用电安全的思想, 在可能发生电流过大的地方需要设置断路器, 因此在系统主电路里分别对交流电主线和驱动器供电部分增设断路器。PLC 内部本身具有220V 交流电转直流24V 的功能模块, 为了避免众多需要24V供电的设备接向PLC,使PLC 内部电压不稳,我们在主电路中又增加了220V 交流电转24V 直流的模块, 供其他需要直流供电的模块使用。为了保障整体线路的可控性和安全性,对驱动器和交流转直流模块等供电电路通断的控制, 主要通过接触器实现。通过控制柜面板上电源开关控制接触器的开断,电源开关闭合,接触器接通,整个电路通电。
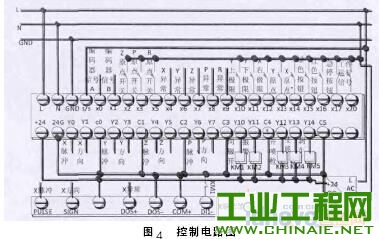
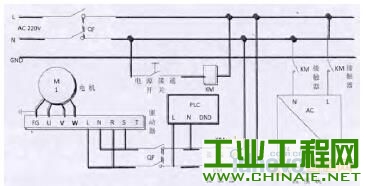 图3 主电路设计图 2.2 控制电路设计 部分控制电路如图4。输入点分高速输入点和通用输入点。X0 和X1 为高速输入点,适用编码器等高频信号的输入。Y0、Y1等输出口为高速脉冲输出口, 主要向用于控制电机正反转运动的驱动器发送脉冲序列和方向信号。其他通用输入口则用来系统启动、停止等开关量的输入和各轴限位开关信号量的输入。通用输出口除用于使能和刹车外, 还能用于系统报警和控制喷枪开关的输出。输入输出口功能定位主要依据各口接收和发送频率大小而定。
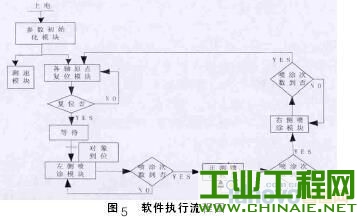
 3 机器人控制软件设计 机器人软件设计主要采用梯形图模块化设计思路, 整个软件由六个功能模块组成:系统参数初始化模块、五轴原点复位模块、喷涂对象移动速度检测计算模块、左侧喷涂模块、正面喷涂模块、右侧喷涂模块。初始化模块用于寄存器参数赋值或清零以及部分辅助继电器使能等操作,比如喷涂总次数设定等;五轴原点复位模块是作用于初始阶段回归各轴到原点位置的复位程序,各轴的原点复位便于机器人后续路径的规划;测速模块包括对喷涂对象移动频率的检测以及计算机器人跟踪频率这两部分程序,主要为X 轴跟踪对象提供数据;两侧及正面喷涂模块的作用是根据对应模块的需要调动相关轴的协调运动。六个模块利用特殊辅助继电器和计数器触发各个功能模块的交替执行,这样设计的程序逻辑结构清晰,程序量少。软件执行流程如图5。
 程序设计除了采用模块化设计思路外, 为了使程序更加简洁高效, 在梯形图中还采用了台达PLC 中集成的运动控制指令,通过直接调用这些指令控制PLC 脉冲的输出模式。比如调制脉冲波宽的PWM 指令,该指令由于具有在指令执行过程中改变其设定值有效的特点, 使输出口的脉冲发送周期能及时根据设定值的改变而改变,并调节电机做相应运转速度的变化,对需要跟踪喷涂对象, 实时控制速度变化的X 轴来讲非常合适。PLSR 是附加减速脉冲输出指令[4-5]。用户可以利用该指令在一定范围内自由设定加减速时间, 以便调节运动轴的起喷速度和末端喷涂速度。Y 轴在上下喷涂移动时速度快,机械惯性产生的振动和噪声很大, 使用该指令可以有效降低Y 轴高速起喷时的振动和噪声。这些指令的使用大大简化了程序编写的复杂性,也方便了我们对电机的灵活控制。 4 结束语 根据以上系统控制设计方法,经过实验室实际调试,完成了机器人对门两侧面和正面的模拟喷涂动作, 达到了跟踪喷涂的要求。该型机器人生产成本低,系统开放性好,适合在中小型家具喷涂企业中应用推广。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

