|
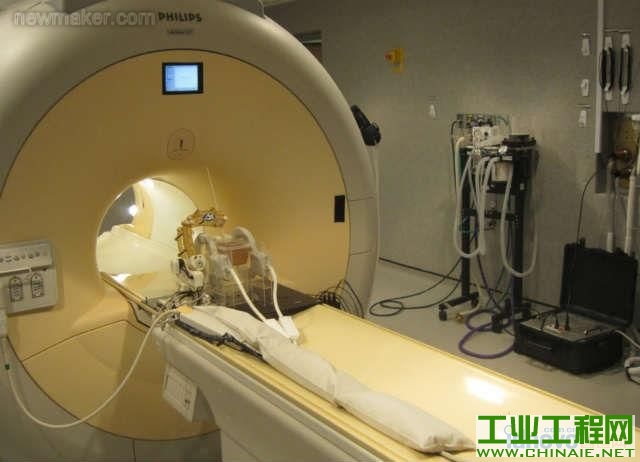
外科医生在进行脑肿瘤治疗时面临一个困境:他们可以使用磁共振成象(MRI)捕捉超高分辨率的肿瘤图像,也可以使用超精密的手术器具移除肿瘤,但是他们不能在同一时间做这两样事情。 至少以前还不能。 现在,伍斯特理工学院(WPI)教授Greg Fischer正致力于开发一种能够在磁共振仪内使用(如下图所示)的外科手术机器人。通过实时反馈,机器人能够将高强度聚焦超声探头准确定位在肿瘤上,以达到最佳的手术效果。当然,要想打造能够在MRI产生的强磁场环境中工作的机器人并不简单,不过WPI的团队做到了,他们利用控制工程和MICROMO的压电定位器,开发了一套彻底变革MRI治疗方式的系统。
 设计这套手术装置的过程充满了挑战。在超高分辨率的情况下,系统需要足够的精确度和可重复度。而且电机需要相当安静。除此以外,还必须足够可靠。而且设计MRI机器人,Fischer的团队还面临一个巨大的挑战。以上这些功能需要能在多种特斯拉磁通量的磁环境中正常工作。 在MRI产生的强大的磁场下,即使像螺丝这么小的铁磁体也可能会产生伤害,更不用说像永磁电机、变速箱、驱动器等运动部件。显然,MRI机器人必须使用非传统的驱动器。他们给出的答案是压电装置。 磁场下的运动 压电驱动器利用了压电陶瓷在外加电压下产生变形的原理。不过存在的问题是压电效应产生的位移还不足部件尺寸的百分之一,而MRI机器人需要高达100cm的直线行程以及连续360度的旋转。 为解决此问题,WPI选用了由一组在外加电压下,会产生轻微弯曲和变形的陶瓷驱动臂组成的Piezo LEGS电机(如图1所示)。
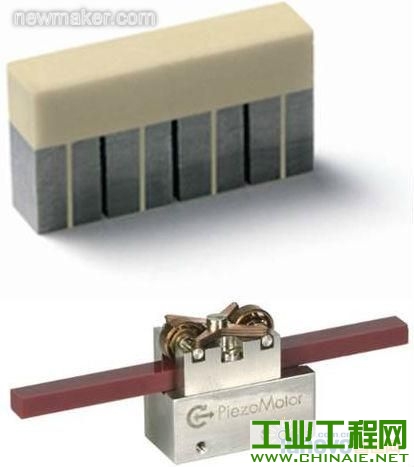 图1. Piezo LEGS电机(下)由对外加电压会产生不同应变的双面压电陶瓷臂(上)组成。 工作时,它们交替驱动的方式(如图2所示)使驱动杆以纳米级的步距,高达15mm/s的速度往前“走”动(或者使转盘转动)。由于总有一组陶瓷臂和驱动杆接触,能够给电机提供高达10N停止力(加持力?),因此可以将它们认为是本质安全的驱动器(在失去动力时制动)。 WPI机器人由一个可在X,Y,Z方向移动的模块和2个与头部框架弧度对应的旋转模块组成。未来的设计还会考虑增加自由度以允许插入、旋转套管和探针。对于直线运动,WPI团队将直接驱动进针的Piezo LEGS直线电机和驱动铝制导杆的Piezo LEGS旋转电机配合使用。对于旋转运动,使用了3D打印的定制皮带轮和橡胶/玻纤增强的同步皮带。
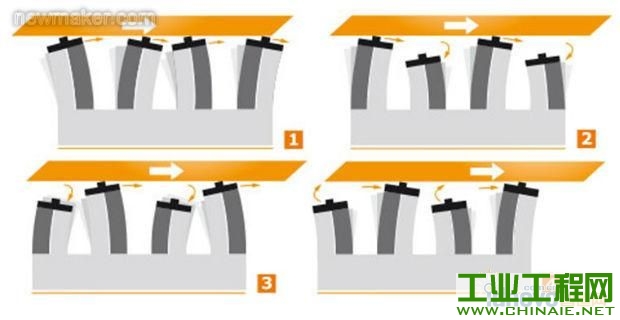 图2.外加的电压使双生的陶瓷臂弯曲和延伸/收缩,从而移动驱动杆向前 虽然材料质量很轻,但是它们产生的摩擦比传统设计更大,这意味着它们需要更高的扭矩以产生运动来作为压电马达的输出。“在许多的应用中,你可以只需要压电马达和直接驱动或者多对一的减速皮带轮就能解决问题,”Fischer说,“不像买一个小型的直流马达,还要配100:1齿轮比的减速箱。” “很多压电电机能达到的最高精度也只是1mm,”Fischer说。“要想更精确,只有少数公司能做到,它们或销售旋转马达或者是需要你设计周围整套设备的驱动杆模块。但是,在我们看来,还没有公司能和紧凑独立的MICROMO装置竞争。” 压电驱动器使用非磁非铁的导电电极。这确保了在MRI环境中的使用安全。但是,这还不够。电源或者驱动电路产生的任何电子噪声都可能会对图像产生干扰。“很多时候,你得到的可能只是能看不能用的静态艺术品。”Fischer说,“电子噪声以及MRI不兼容的材料能够明显扭曲图像,你所看到的图像和真实的完全不一样,重要的是,你需要使用这些图像来为你的手术做指引。” 显然,此应用需要专业的电子产品。同时,压电马达的特性也意味着需要精密的驱动波形。为解决这个问题,Fischer团队开发了一套控制模块来操作MRI中的压电马达。他们编制了FPGA来调整驱动信号波形的相对频率和相位。高速数模转换器提供精确的波形控制,高带宽、高压的直线放大器确保控制器合成产生运动所需的准确的驱动信号。 外部的过滤器去除噪声,编码器反馈使单片机的闭环位置或速度控制能够在单板上运行实时控制回路。模块化的底架能够与最多8块这种电路板一起安装在屏蔽箱内并与机器人放置在MRI扫描器上。定制的电缆连接机器人和控制器,能够进行最多8轴的控制。 现有的标准压电电机大大简化了整个项目。“这些可靠的现成的驱动器,直线或旋转的,非常有用。”Fischer说,“它们可以让我的学生们可以将精力放在机械机构设计和控制设计上。” 但是项目的目标远不止手术机器人。Fischer的目标是开发MRI兼容的机器人开发套件,包含传感器,驱动器,控制器,放大器,并用通信协议增强。“在工业应用中,你可以购买PLC,马达以及编码器,将它们接起来,马上就有了一套可用的设备。”他说,“但是对于医疗设备还没有类似的东西,更不用说MRI了。” 为达到此目的,该团队正在开发MRI机器人在其它应用的扩展,包括脑深部肿瘤的高精度热消融,帕金森病的脑深部刺激电极放置,以及针对MRI指引的前列腺癌检查和局部治疗。 “我们的目标很明确,应用也很具体,它们都是基于现有的电机开发的。”他说,“在我的实验室里,有市场上能够买到的所有压电马达。我们甚至尝试自己制造。对于我们来说MICROMO驱动器不管是尺寸,力范围还是力矩范围,都很合适。总的来说,非常有效。” |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


