|
0 引言 现代工业生产中,通常采用双工业机器人以协调的方式完成一些复杂的作业,诸如搬运、焊接与装配等。双工业机器人的协调作业能够有效地提高机器人系统的负载能力、作业空间、作业速度以及可靠性。一般而言,双工业机器人的协调作业情况如下:一是在双工业机器人工具坐标系原点(Tool Center Point,TCP)之间无相对运动的情况下工作;二是双工业机器人能够合作完成TCP之间有相对规则、可描述运动的协调作业。对于第一种情况而言,从原则上讲,只要单个工业机器人的负载能力足够大、操作空间足够大,就可以完成任务。而对于第二种,诸如螺旋副的拆装等在单个工业机器人情况下则无法完成。 20世纪90年代初,国外学者开展了对双臂机器人的研究,研究工作主要表现在双臂机器人的运动规划、协调控制算法及操作力或力矩的控制等方面。文献首次研究了双臂夹持一个物体的协调运动约束关系,针对两刚性机器人协调操作一把钳子的情况,导出了系统的位置约束、方向约束和速度约束等方程。文献就双工业机器人的复杂作业提出面向操作物的运动描述与规划方法,以及适应于双工业机器人系统的基于关节位置控制的协调控制策略。文献提出利用optotrak3020三维测量系统获得精确位置信息进行双工业机器人协调操作的方法。 本文以两台FS03N工业机器人为研究对象,研究双工业机器人协调作业模型的建立,并以双工业机器人协调作业完成螺旋副拆装为例,以工业机器人运动学分析与双工业机器人安装位置关系为基础,通过对协调作业运动约束的分析与描述,从而实现双工业机器人轨迹规划与协调控制。 1 机器人的运动学分析 1.1 机器人运动学正解 FS03N工业机器人是川崎公司生产的关节式机器人,6个关节都是转动关节,即JT1~JT6,FS03N工业机器人投杆件坐标系如图1所示。
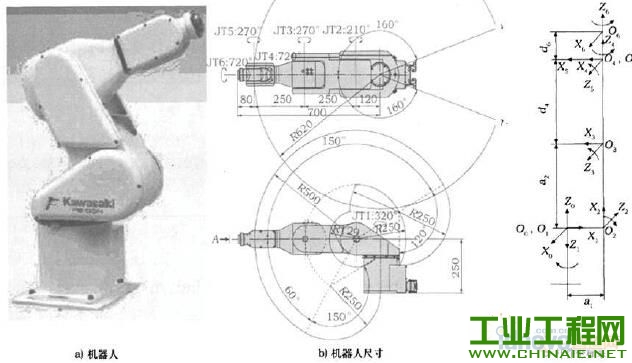 图1 FS03N工业机器人投杆件坐标系 根据图1所示的扦件坐标系,得到如表1所示的连杆参数。

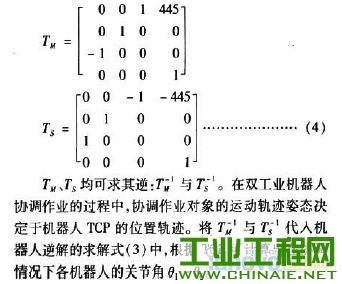
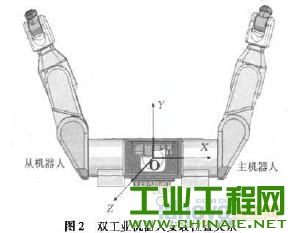
 2 双工业机器人的协调作业 2.1 双工业机器人坼弼作业的任务描述及策略分析 假设烈工业机器人拂调作业对象的特征已知,具有已知的位姿。双工业机器人协调作业的任务是指:在作业过程中,通过一些约束前提,建立两个机器人之间的相对轨迹关系,得到各个机器人的位姿,然后传递给各个机器人,并通过机器人控制器得到反馈信号,根据信号进行轨迹的调整,实现舣工业机器人的协调。 鉴于FS03N工业机器人系统配有控制器,该控制器是能够基于关节位置反馈的,两机器人的冉调控制应以此为基础。采用主机器人(master robot)、从机器人(slave robot)控制策略,即把两机器人按主、从区分对待,首先建立系统的c空间,根据目标点的轨迹确定主机器人的运动轨迹后,以两机器人的安装位置关系与两机器人TCP相对运动轨迹确定执机器人的运动轨迹。 2.2 双工业机器人的安装位置描述 一般而言,双工业机器人的相对安装位置如表2所示。在研究中,双工业机器^模拟人的左、右两臂,所以主机器人与从机器人的安装方式均为侧装,双工业机器人安装位置关系如图2所示。经过坐标变换,使得双工业机器人TCP均相对于图2所示坐标系建立,通过测量和设置,主、从机器人生标的变换矩阵TM、TS分别为:
 2.3 双工业机器人拆装螺旋副 等螺距螺旋副根据其形成特点.在螺旋线上的点A(z,y,z)可以描述如下:
 在双工业机器人拆装螺旋副的时候,由主机器人夹持外螺纹做直线运动,从机器人夹持内螺纹部分做旋转运动。在这种情况下,建立主、从机器人相对双工业机器人的安装坐标系的变换齐移:矩阵为:标系中的坐标。 式(6)描述了机器人在拆装螺旋副时候的坐标变化,式(6)与式(3)联立即可建立机械手在螺旋副运动中的姿态与各关节变草的一一对应关系。 双工业机器人在拆装螺旋副时应同时协调速度量。由于主机器人吏持外螺纹部分做直线运动,从机器人夹持内螺纹部分做旋转运动,则:
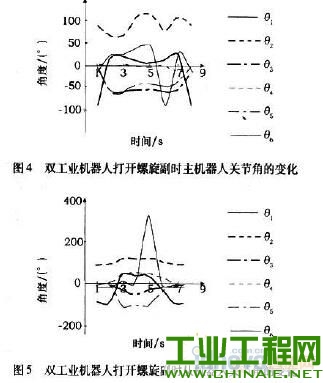
 2.4 试验结果 图3所示为上海大学机器人实验室提供的两台FS03N工业机器人进行协调作业拆装螺旋副.图3中左边机器人为主机器人,右边机器人为从机器人,主机器人根据式(6)与式(9)、从机器人根据式(6)与式(10)可顺利完成螺旋副的拆装。图4与图5所示为打开螺旋副时,主、从机器人各关节角的变化及协诃关系。
 3 结语 双工业机器人协调进行螺旋副的拆装能体现双工业机器人西调的优越性。从实际应用的角度出显,通过研究提出了作业运动的描述、双工业机器人位姿、速度的对应与分解等问题的解决办法,并通过改变机器人戈节角来控制双工业机器人工具坐标系原点,以实现机器人的西调作业,取得了满意的试验结果,也展示了双工业机器人协调的巨大应用前景。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1