|
一、工业机器人的由来 1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的一记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1959年LTNIMATIQN公司的第一台工业机器人在美国诞生,开创了机器人发展的新纪元。最早的关节机器人LTNIMATIDN的、TALC veryadvantage language)语言也成为机器人领域最早的编程语言在各大学及科研机构中传播,也是各个机器人品牌的最基本范本。其机械结构也成为行业的模板。其后,UNIMATION公司被瑞士STALTBLI收购,并利用STALTBLI的技术优势,进一步得以改良发展。日本第一台机器人由KAWASAKI从uNrn}IAT}ON进口,并由kawasaki模仿改进在国内推广。 二、工业机器人的定义 工业机器人的定义在国际上还没有统一的规定,但普遍认为它是“在三维空间中,其有高自由度,能进行多种动作功能的设各”。现代的工业机器人可定义为“具有类似人体上肢臂、手动作功能的、可进行多种动作的设各,或具有感觉功能、认识功能,能进行自律性行动的设各,即智能机器人” 三、工业机器人的特点 (1)技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术一丁飞一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是1一业自动化水平的最高体现。 (2)技术升级工业机器人与自动化成套装各其备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计一算机之后,出现的全而延仲人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。 (3)应用领域广泛工业机器人与自动化成套装备是生产过程的关键设各,可用一于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。 (4)技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。 四、工业机器人的动力源 目前工业机器人使用的动力源有电气式、液压式、气动式、机械式及真空吸附和磁力式等,在电气式动力源中多用伺服电机和步进电机。伺服电机与微型机相结合,可以完成各种控制,所以被广泛的应用一于各种工业机器人上。直线运动的部利直接采用直线电机驱动。由于不需要运动转换机构,所以具有高速、高精度的优良控制性能。不断发展和改进的步进电机由一于能适应多种控制形式而在上业机械人中得到广泛的普及。在液压动力源中,喷嘴挡板式电液伺服阀可获得高精度的位置和速度控制是应用最广泛的控制元件。气动式动力源所使用的介质是可压缩的气体,所以给控制带来很大困难,只限一于在单纯作双位置动作控制时采用。 为了实现动力源的小型、高输出,多自由度,文章还报道了目前正在开发的超声波马达、记忆合金驱动元件以及生物微型机械手用压电动力源等。 五、工业机器人在玻璃行业的应用 1, (1)某平板玻璃生产线由于经常发生人工堆垛玻璃而发生玻璃表而擦伤及沾染污渍而导致玻璃报废,而且搬运过程中浪费了大量劳力,工作效率很低。因此,东南大学控制系经过努力研究、实验。最终研究出来了一个机器人,这个机器人从而解决以上的人所达不到的目的。 (2)以下三幅图便是我们研究的机器人相关结构图:
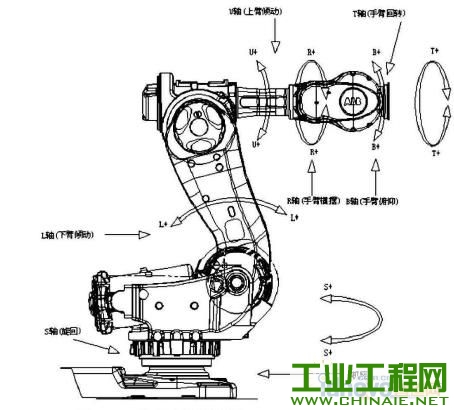
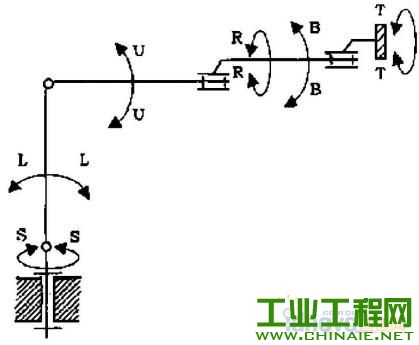
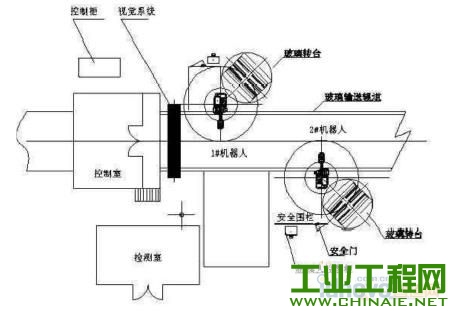 (3)为了解决上面的难题,我们采用了4台ABBUP 工业机器人并将其加以改造,从而用于自动码垛系统的作业,ABB UP6机器人自动装箱、码垛系统是一种集成化的系统,包括上业机器人、控制器、编程器、机器人手爪、在线机器人视觉系统和码垛模式软件。系统配置自动称重、贴标签和检测与通信系统。并与生产控制系统相连接,以形成一个完整的集成化玻璃生产线。这种柔性码垛系统通过机器人用吸盘式手爪抓取平板玻璃,并进行玻璃码垛作业。 2,(1)玻璃基板搬运机器人是一种应用于无尘或真空环境下的传输用工业机器人,已主要应用在FPD产业中,联结前后段制程并在各制程中实现玻璃基板的交换与传递。因此,该玻璃基板搬运机器人应具有高刚度、高速度、高定位。 (2)目前,FPD产业中玻璃基板搬运机器人常用构型有多关节型机器人、直角坐标型机器人和圆柱坐标型机器人。多关节型机器人通常含有4~6个自由度,定位精确度高,灵活性大,但其运动控制和轨迹规划较复杂,手臂结构刚性较低,且设计制造该类型机器人成本较高。直角坐标型机器人通常具有2~3个自由度,其运动空间常为长方体,该类型机器人结构简单,结构刚性好,定位精度高,但其体积大,运动时的空间利用率低。 3、玻璃码垛机器人的特点就是高速和重载。玻璃是片状物品,而积较大(本项目最大码垛玻璃尺寸:2440*360mm,高速600片/h,但速度问题按照目前技术水平,完全能达到;中片玻璃其重量在360kg以下,因此机器人抓起重量应不低360kg,360kg对六轴机器人是属于重载,目前国内机器人均属于轻载,其抓起重量在15Q kg以h。国外用于玻璃码垛超重载机器人最大抓起重量已达到1200kg,因此研发重载、超重载机器人,是机器人发展的必然趋势。 4、估计己有多达25D个机器人正在世界玻璃工业中上作。其用途十分广泛:雷达设备、电视显象管、白炽灯泡、日光灯管、平板玻璃、广口瓶以及玻璃容器的生产。如果说资方把自己贡献一于这项技术,这只不过是机器人在玻璃上业中应用的光明未来的开端。 5、机器人的首要用途之一是在玻璃输送的操作中,通用机器人被用来码放日光灯管。机器人的这项工作是要码放灯管的装载板。该装载板放在链式传带旁边的机器人身上。当传送带端头的灯管到达一个限位开关时,传送带停止了。开关指令机器人,在拾取区内有31根灯管一正好码一层。机器人就一卜拾起这31根灯管,转动90℃后,把它们放在四周有立桩的装载板上。当码满24层时,机器人暂停,并指令传送带送另一组空装载板。 六、工业机器人在陶瓷行业的应用 1.建立机器人快速制造粘土类陶瓷原型加工系统,针对所加工材料的特性选择合适的刀具和机器人加工轨迹。针对软材料的切削原理,研究针对粘土材料的机器人加工艺,找到合适的加工参数,制作满足熔射制模技术要求的耐高温陶瓷原型。通过对粘土坯料进行加工实验,验证了新工艺的可行性,同时也发现了一些问题,比如切屑粘刀,排屑不畅及精加工过程中的崩豁问题,这些都需要我们在后面的研究中继续展开工作。 2.陶瓷原型加工路径的建立。以汽车覆盖件陶瓷原型,其最大尺寸(370*325*70)mm,成形件表而质量要求高。因此,以汽车覆盖件陶瓷原型为例讨论陶瓷原型的加上,具有比较典型的代表性。基于UG CAM对机器人加工路径进行规划。使用UG时,操作者可以通过对话框进行加上参数设定与修改,包括几何参数、刀具、方法、程序四方而。首先选取加工方式,设定相关参数后,可生成刀轨路径。然后通过仿真检查井优化刀轨,生成NC代码。最后用本实验室开发的转换程序NC2JBI,实现NC代码到机器人的代码转换。 3.从不同方向返回测点时都存在不同的误差;机器人轨迹中存在误差最小的坐标轴方向,走刀时应尽量沿此方向。机器人轨迹位置精度测量的结果;最大、最小误差的变化趋势基本相同,但两者相差约0.01mm;行走速度变化时,两种误差的变化规律基本相同,不随行走速度变化。建立NC代码与机器人代码的转换公式,考虑沿轨迹位置误差最小的轴方向走刀并对轨迹作补偿处埋,得到了可生成优化的机器人铣削路径代码的算法和CAM软件。实际加工得到用于熔射制模的陶瓷型熔射原型,满足熔射要求,从而验证了所开发的软硬件以及加工技术的可行性。 4.工业机器人在陶瓷行业的应用,在国外已是一个较为成熟的技术。工业机器人在施釉和翻模、坯胎出模的上序中适应了不同的工件和模具。这样,可在施釉工艺这样一种粉尘较大、作业较复杂的工作中,取代人工作业,提高产品质量和劳动生产率。在翻模、取坯作业这种体力劳动强度大,需较仔细的作业中避免人工操作易疲劳,造成功效低,易损坏毛坯的毛病。另一方而,由于机器人能“存入”许多工件的最佳施釉工作“曲线”,且每次调用只需非常简单地将相关的程序调人机器人的“当前”操作指令中。所以,一旦工件变化时,机器人能以最快的速度适应工件,喷涂出高质量的釉而。这是人难以达到。 5.工业机器人快速制造原型是正在发展的一种快速制造原型和零件的方法,但是在过去的十几年,它的应用范围普遍局限于石蜡、木材、塑料和轻金属等材料。研究人员考虑缩短产品的开发时间,提高设备的功能性以及环境和谐性和产品质量,己经构筑了多种机器人快速原型系统。构筑了一个铣削泡末材料的快速原型系统机器人系统。构筑了而向大型制件的机器人快速原型系统,工作空间为4m*2m *2m,可以制作许多大型零件。构筑了基于双机器人的快速灵活制造木制船模系统。发展了一个基一于工业机器人的薄壁铝金属成型系统。国内机械科学研究总院单忠德研究员在机器人快速制造铸型方而也做了很多工作。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

