|
0 引言 工业机器人又称为机械手,在现代化工业生产中正发挥着越来越重要的作用,被广泛应用到流水生产线上,代替人类从事焊接、喷涂、搬运等许多较繁重的劳动,工业机器人的广泛应用正在日益改变人类的生产方式和生活方式,成为世界各国备受关注的产业。 工业机器人一般由机器人本体、机器人控制系统、电控箱以及人机操作界面等组成,其中,机器人控制系统是机器人的核心部件,它实施机器人的全部信息处理和对机器人手臂的运动控制,是一种典型的多自由度实时运动控制系统。传统的工业机器人控制系统往往采用专用计算机和专用微处理器的封闭式体系结构,不利于机器人系统的维护和扩展。 RTX是美国Ardence公司开发的基于windows操作系统的实时解决方案,随着实时软件规模和复杂度的递增,RTx成为开发基于工业计算机的实时控制软件的首选方案。本文提出了一种基于RTX的工业机器人控制系统,以工业计算机与RTx实时操作系统为核心,将windows操作系统与RTx操作系统相配合,既能够满足工业机器人控制所需要的实时、高精度和多任务的要求,又具有开放性和可扩展性的优点。 1 工业机器人 在工业发达国家,机器人已经广泛应用于汽车工业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、物流、制造业等诸多领域中。 在机器人本体的研究制造中,我国基础零部件制造能力相对较弱。虽然我国在相关零部件方面有了一定的基础,但是无论从质量、产品系列全面,还是批量化供给方面都与国外存在较大的差距;特别是在高性能交流伺服电机和精密减速器方面的差距尤其明显,因此造成关键零部件的进口,影响了我国机器人的竞争力。目前,已经有一批机器人企业根据市场需求,自行研制或与科研院所合作,利用自身技术优势,进行机器人开发。 德昌电机自主研发的四轴工业机器人本体的3D模型图如图1和所示。工业机器人的驱动装置采采用交流伺服电机与谐波减速器的组合。
 图1四轴机器人本体3D模型图 四轴工业机器人本体的关节结构由回转的机体、大臂、和小臂组成,第一关节、第二关节和第四关节为旋转关节,其轴线相互平行,在竖直方向旋转,在平面内进行定位和定向;第三关节是移动关节,用于完成机械手末端在垂直于平面的运动。机械手末端的位置是由第一个和第二两个旋转关节的角度和移动关节的位移决定,它的工作范围类似于一个扇形区域。它最适用于平面定位,垂直方向进行装配的作业。 2 基于RTX的机器人控制系统设计 2.1 RTX系统介绍 RTX作为Windows操作系统的实时解决方案,它是Windows系统内核体系的延拓,修改并扩展了硬件抽象层HAL,实现独立的内核驱动模式,形成与Windows操作系统并列的实时子系统(如图2)将原有系统的线程间切换时间消耗缩短到几微秒。
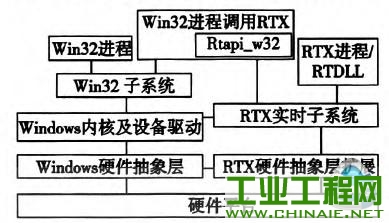 图2 RTX体系结构图 通过扩展的实时HAL,RTSS使用自己的中断管理模式,RTX线程总是优先于windows线程取得调度权。RTX使用windows系统的调度策略,对自己的实时线程进行严格调度管理;同时,RTX线程(包括中断服务、延迟调用)总是优先于windows线程取得调度权。通过扩展的HAL,RTX有着自己的中断管理机制,而且能够直接访问I/O硬件端口。所有这些机制都保证R7D(线程始终占据优先权,不会被windows线程阻塞,而且可以通过端口的控制实现设备驱动程序的功能,直接对目标设备进行控制。RTX线程和Windows线程之间通过共享内存交换数据,通过实时信号量进行同步和通信。RTX定时器的精度可以由运行环境自行设置,一般能达到0.1ms的精度。 RTX系统可以实现实时精度很高的工业控制,特别是中断响应时间的快速性可对工业机器人的高速运动控制提供保障。 2.2 机器人控制系统体系结构 机器人的手臂的驱动装置是一个为了跟踪目标值对手臂当前运动状态进行反馈构成的伺服系统,无论何种伺服系统结构,控制装置的目的是检测个关节的当前位置以及速度,将他们作为反馈信号,直接或间接的决定个关节的驱动力。
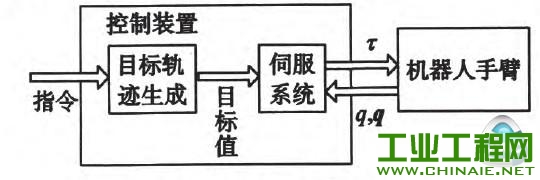 图3机器人手臂控制系统的构成 基于RTX的四轴机器人系统硬件结构图如图4所示。系统的硬件包括:工控机,两种类型的PCI板卡:D/A转换卡以及编码器卡,伺服电机驱动器,伺服电机等。
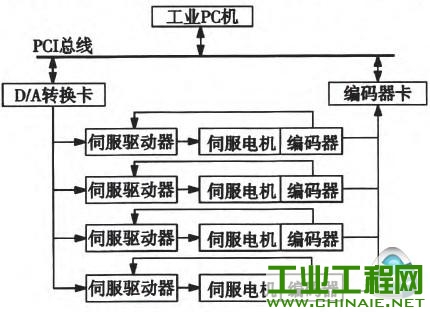 图4 四轴机器人硬件结构图 机器人控制系统平台的结构如上图5所示。工控机上运行的机器人控制系统包括两个模块:
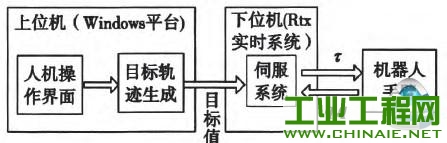 图5 Windows+RTX的机器人控制系统平台 (1)下位机——基于RTX的机器人控制器; (2)上位机——机器人人机操作平台。其中,上位机机器人人机操作平台的功能包括: (1)正、逆运动学计算以目标轨迹生成; (2)与RTX机器人控制器进行通讯; (3)机器人运动的显示; (4)机器人各关节编码器反馈信息以及机器人状态监控信号的显示。 下位机基于RTX的机器人控制器主要功能为: (1)通过编码器卡实时接收到电机位置反馈数据; (2)通过共享内存接收上位机给出的实时目标指令; (3)反馈数据和目标指令经过控制算法模块,给出控制指令经过D/A转换,输出模拟信号控制伺服电机驱动器,形成一个闭环控制系统。 3 实验结果 基于上述的软件和硬件平台,实现了基于RTX的机器人系统,JE四轴lkg工业机器人本体如图6所示,图7为工控机上运行的上位机机器人操作平台界面,RTx下位机运行在后台,没有显示界面。工业机器人的本体重量为2Kg,额定负载为1Kg,一轴和二轴选用200W的伺服电机,三轴和四轴选用100W的伺服电机,末端最大运动速度达到1.5m/s;RTX机器人控制器的控制周期为1ms,使用S型曲线对每个关节轴进行运动规划控制(如图8所示)。
 图6 JE四轴lKg工业机器人机器人本体
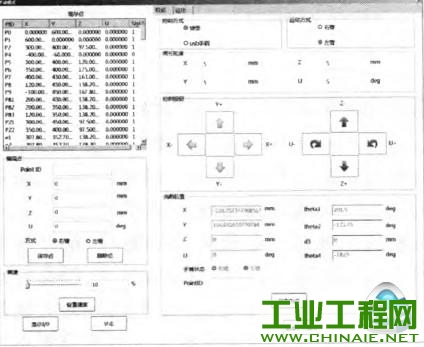 图7上位机机械手操作界面
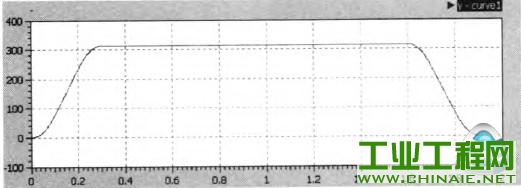 图8 S型速度规划运动曲线 使用FARO激光跟踪仪对机器人运动轨迹精度进行测量(如图9所示),将激光跟踪仪靶球固定在机器人末端,激光跟踪仪发射与接受器实时快速跟随把球的移动,测量机器人的运动轨迹精度,测试结果如表1所示,完全满足应用的要求。
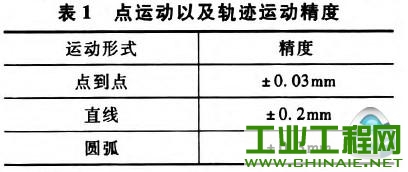
 图9激光跟踪仪轨迹精度测试 基于RTX的工业机器人控制系统的体系结构具有灵活和可扩展性,主要体现在以下方面: (1)对下位机的控制算法进行更新时,只需要在控制算法库中扩展新的算法,上位机以及整个系统不需要做改变; (2)将该体系结构应用于不同系列型号的六轴或者七轴工业机器人时,硬件上只需增加相应的D/A转换卡和编码器卡,软件上只需在上位机部分扩展新型号机器人运动学解算算法库和操作界面,系统的整体架构不需要任何改变,从而简化了软件和硬件的设计,缩短了工业机器人系统的开发时间。 4 结束语 本文设计并实现了基于RTX的工业机器人控制系统,利用Windows的丰富资源以及RTX强大的实时处理能力,实现了一个开放的可扩展的工业机器人控制系统平台,为机器人的控制算法和功能扩展提供了基础架构;最后将该控制系统成功应用于自主研制的四轴工业机器人,实验和测试结果表明,基于该系统的四轴工业机器人具有良好的运动控制效果。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

