|
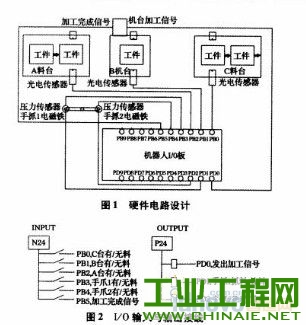
机器人可分为娱乐机器人、服务用机器人和工业用机器人,其中工业用机器人随着工业自动化的发展,逐渐成为机器人队伍中的主力军,被越来越多的使用.随着用工成本逐年上升,我国的制造企业必然会像国外发达国家一样,更多的依赖工业机器人.机器人自动化生产线具有柔性高、生产效率高、自动化率高、不良率低等诸多优点,它正取代人工生产线.而数控加工取放料自动化是提高劳动生产率和改善劳动条件的主要方法和有效措施。 1 整体设计 传统的数控加工取放料工艺采用的是人工生产方式,工人从取料台A手动取料,放在数控机床的工件台B上,手动按下数控机床的开始按钮开始加工,数控机床加工完成后指示灯或声音提醒工人再将加工好的工件从数控机床的工件台B上取出,放到放料台c上,转人下一道工序.每名工人要负责5~10台数控机床的取放料,工人的劳动强度很大,还出现工件放置位置偏移引起的加工误差,操作不当引起的工人手臂受伤等心。 本设计采用六轴工业机器人,双手抓设计,一台机器人配合一台数控机床(如果机床加工时间较长,可以设计成一台机器人配合两台或多台机床)完成工件的取放.机器人在数控机床侧面的地面安装,与数控机床没有机械上的连接,通过电缆进行信息交换和控制;通过编程器对机器人进行编程操作和动作轨迹等调整,能适应各种工件形状和加工要求.从安全生产、产品质量的稳定性、人员劳动 强度和生产效率等各方面进行比较,自动化生产方式有较大优势,也是数控加工自动取放料方式的发展趋势。 使用机器人自动化线短期存在一次性投资大的缺点,但从长远来看,特别是工人的用工成本不断增加和用工紧张等因素,工业机器人将会更经济、适用,同时也适于已有生产线的自动化改造. 2 外围电路设计与连接 要使机器人和数控机床实现通讯,需要在机器人的I/O控制板和数控机床的I/O控制板之间连接外围电路,增设一些按钮开关、传感器件、指示灯等硬件实现对机器人、手抓抓放料、数控机床、工件的有无、开始加工、加工完成等信号的采集、传递和显示.其中手抓的抓放料通过控制电磁铁或气缸手抓来进行抓取和投放,本设计采用的是用电磁铁来实现抓放料,硬件电路外围设计如图1,I/O板输A/输出接线如图2所示。
 3 软件设计 设定手抓1从A台取料,B台放料;手抓2从B台取料,C台放料。工作初始,在机器运转前手动在机台B上放置1个待加工工件,按下开始(自动加工)使机床开始首件产品的加工任务并按程序自动进行。机器人首先进行零点位置(即初始位置)判断,如不在零点位置,机器人会给出提示,此时需手动控制机器人手抓运动到零点位置后,再开始初始化子程序。 主程序设计流程如图3所示,条件(1)手抓l无料,手抓2无料,A台有料→执行手抓1到A台取料子程序Get_A;条件(2)手抓1有料,手抓2无料,B台有料,机台加工完成→执行手抓2到B台取料子程序Get→B;条件(3)手抓1有料,手抓2有料,B台无料,→执行手抓1到B台放料子程序Put_B;条件(4)手抓1无料,手抓2有料,C台无料→执行手抓2到C台放料子程序Put_C;循环判断条件1到条件4并执行相应的子程序。
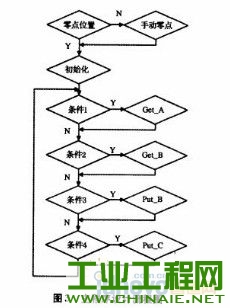 图3主程序设计流程图 初始化子程序:手抓1无料,松开手抓1;手抓2无料,松开手抓2。
   通过机器人的示教器或在电脑上进行离线编程,子程序编写用move或draw等指令即可实现,关键是点位的设置,为了保证精确,可通过多设置几个点位来实现精细运动.可离线在计算机上对机器人的运动轨迹和路线进行模拟仿真,避免到生产现场才发现诸如节拍不合理等情况,缩短现场的调试周期。 4 生产过程的安全控制 安全运行是生产线的最基本要求,因此在进行机器人应用时,要配置完善的安全装置与安全控制,实时显示安全区域状况。 机器人和数控机床的作业区应处在安全围栏中,如在正常运行过程中,有其它人员进入该区域,通过装设在安全门上的行程开关使机器人停止工作,在编程和维修模式下工作人员可以进入该区域工作.同时整个控制系统的所有紧急停止信号,数控机床和机器人之间的安全联锁信号都连入安全系统,通过程序进行互锁控制,能够在出现故障和异常状况时,及时发出声光报警信号和停机控制信号,并通知操作人员处理。 5 结论 机器人应用在数控加工生产线,可适应不同产品的加工要求,适合规模化生产和产品更新换代快等生产需求。既改善了劳动条件,确保生产安全,又可提高劳动效率和产品质量,降低产品成本,随着机器人生产线的安装、调试周期逐步缩短,回报周期也相应缩短。此种模式对现有的机械加工,特别是数控机械加工中心等数控设备,采用配套机器人的自动化生产线,越来越为加工制造企业所接受,成为今后改造已有的生产线或新增生产线作为参考和借鉴。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

