|
螺柱焊是快速焊接紧固件的一种方法,不仅效率高,而且可以通过专用设备对接头质量进行有效控制,得到全断面熔合的焊接接头,保证接头的导热性、导电性和接头强度。由机器人操纵螺柱焊枪焊接螺栓时,可以进行全方位的焊接。机器人螺柱焊具有位置精度高、焊接质量好且稳定、焊接速度快等优点。 螺柱焊接机器人工作站的组成 焊接机器人工作站由七部分组成: 1)焊接机器人系统一套:FANUC R-2000iB/165F+外部轴(见附图)。
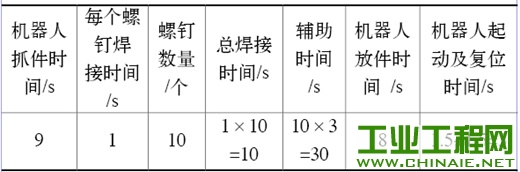
 2)振动料斗三套。 3)系统安全与防护房,包括安全光幕、安全门、TEKA 排尘系统和压缩空气处理系统。 4)螺柱焊枪三套。 5)触摸屏操作台,包括触摸屏、悬托臂、操作盒、工控机显示器安装架和监控显示器安装架。 6)机器人抓具三套和工件上下料夹具一套。 7)PLC控制系统:SIEMENS PLC S7-300+ MP177可移动彩屏+ PLC控制柜+ 三色灯 +工位照明+双手起动按钮+ ProfiBus总线通讯模块。 工作站的设计及工作原理 1.设计依据 1)仪表板骨架二维图样、产品图及数模。 2)车厂工艺标准。 3)标书要求。 2.焊接工件的基本要求 1)零件焊缝处的一致性误差小于±0.5mm。焊接工件焊缝以及节拍计算见附表。
 2)零件上不应该有影响定位及焊接的飞边。 3)零部件或零部件分总成应符合所提供的图样尺寸。 3.焊接机器人工作站工作原理 (1)工作站工艺流程?系统起动一切正常后,操作者到装卸件工位将长管及短管安装到上料夹具上。装件完毕后,退出装卸件工位按双手起动按钮。夹具自动将工件夹紧,快速卷帘门关闭,工作站处于就绪状态。当机器人回到原点并符合起动条件后,机器人抓手将上料夹具上的工件抓起放到螺柱焊接区域进行焊接。每把螺柱焊枪只可以焊接一种规格的螺钉。机器人根据操作者在触摸屏上输入的工件类型自动调用相应的程序。 焊接过程中,机器人抓手上的外部轴电动机带动工件回转到合适的角度配合机器人进行焊接,快速卷帘门自动打开,操作者将长管及短管安装到上料夹具上。机器人焊接完毕后将工件放到下料夹具上,然后从上料夹具上抓取新工件进行焊接。机器人抓取工件进行焊接时快速卷帘门自动打开,操作者把新工件安装到上料夹具上,然后将焊好螺钉的工件从下料夹具上拿走。操作者退出装卸件工位按双手起动按钮,快速卷帘门自动关闭,工作站进入下一工作循环。 (2)控制系统?控制系统采用SIEMENS PLC,通过PROFIBUS-DP网络将夹具上的传感器等信号采集到CPU内,并通过PROFIBUS-DP网络将处理完毕的信号送到夹具上的执行元器件。通过PLC的I/O点直接将工作站的其他周边信号,如维修门操作盒、安全光幕等联成一个整体,实现对工作站的管理和控制。PLC与触摸屏的连接通过专用的MPI电缆,PLC与机器人之间的通讯采用PROFIBUS。PLC为主站,机器人为从站。 MP177可移动彩屏西门子控制器用于显示工作站各设备的运行状况及故障类型。触摸屏为中英文双语界面,主要用于系统维护人员对系统进行维护和故障分析。运行方式分自动和手动两种:自动方式时,操作者仅需起动就绪按钮,工作站自动完成机器人焊接作业、夹具打开等连贯动作;手动方式时,操作者可通过触摸屏对各夹具实现单步分解动作。工作站设置三色塔灯指示工作状态,并采用故障声光报警。机器人工作站均安装有维修门和门安全锁。 在装卸件工位的围栏开口处设有双手起动按钮盒,通过按动操作盒的就绪按钮来通知系统装件已经完毕。 (3)工件上下料夹具及机器人抓手?夹具气动元器件主要采用FESTO或DESTACO气缸;夹具上检测工件有无的接近开关选用Balluff品牌;采用电磁阀控制气缸动作;夹具上面的电信号与控制柜的电气连接采用航空插头的方式;夹具气缸安装夹紧到位和松开到位检测开关,能检测工件的装夹情况,工件装夹不到位或未压紧,系统能自动报警。夹具的某些动作之间具有连锁和互锁保护功能;夹具在设计时考虑方便操作者卸料,夹具上定位销采用抽销机构;机器人抓手设计时考虑焊枪的可焊空间,符合生产工艺要求,应保证最佳焊接姿态及焊接效果,使焊枪、工件、抓手互不干涉;夹具上面的定位销和定位面设计有3mm的调整环节;工装夹具定位准确,操作方便,结构合理,可靠性高。定位面材料硬度达到40~45HRC。 (4)买方现场环境的基本要求?环境温度0~45℃;相对湿度≤80%;振动加速度<0.5g;三相电源380V;电压波动范围±10%;频率50Hz。电源要求:要求机器人控制柜电源和焊接用电源从电网变压器分别引出,配有独立的空气开关。详细的电源要求待详细设计后向买方提出要求。激光发生器与控制柜必须分别接地,接地电阻<100Ω。 压缩空气50N/cm2(需滤出水、油);所有设备与地面联接用膨胀螺栓,要求水泥层的厚度至少为300mm,做常规车间地基处理;车间高度、门窗等无特殊要求。 结语 原手工焊接螺柱的方法已不能适应企业生产的需要,而采用机器人的柔性焊接技术适应了当今工业快速发展的需要,已成为螺柱焊接行业的一场技术革命。机器人技术在仪表盘骨架螺柱焊接中的应用,保证了焊接精度和焊接强度。从根本上提升了企业的装备水平,提高了产品的加工质量,降低了材料消耗,节约了成本,增强了企业产品的市场竞争力。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

