|
通用工业机器人具有高度的能动性和灵活性,具有广阔的工作空间,能适应各种工况环境,可满足各种各样的工作要求,能完成不同的作业任务。因此,工业机器人在现代生产制造系统中起着越来越重要的作用。然而,现今市场卜的通用T业机器人大多价格昂贵,体积笨重,且具有一定的危险性。为了研究通用工业机器人基于运动学的控制,本文主要进行一个工业器人模型系统的快速搭建,包含机械结构.必十及控制系统的软硬件设计2部分。 1 通用工业机器人模型设计 设计一个工业机器人的模型,考虑到经济性,选用步进电机作为驱动器件,模型关节轴通过联轴器直接与电机轴相连,省掉了减速及传动机构,结构简单。模型大部分结构利用铝板进行搭建,减轻质量,降低电机功率,所有的连接均采用螺栓连接,只需加工通孔,降低了加丁成本。利用铝合金型材搭建底座。电机选用步距角1.8°的混合式步进电机,选用的驱动器可以实现最多128细分,大大提高’厂机械的运行精度。步进电机使用时,取动器设定好参数后仅需给其输入方向和脉冲信一号,简单方便。图1所示为设计的机器人人模型实物图。
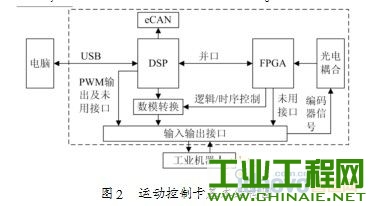
 2 运行控制卡设计 为了控制机器人运行,设计一r运动控制卡,通过USB接口可与任何一台电脑组成简易控制系统。电脑中利用Mathematica软件进行逆解运算及轨迹规划等任务,处理后的结果通过USB接口发送给控制卡。控制卡接收电脑发送的指令,控制机器人模型的运动。这样就组成厂一个简单的开环的机器人模型控制系统。 控制卡设计时考虑到以后智能控制算法及伺服电机控制等的应用,采用了DSY+FPGA的结构。DSP进行智能算法的运算,FPGA用来实现I/OO扩展及外围芯片的控制等功能。选用的DSY型号为TMS320F2812,是32位定点芯片,运行时钟高达15MHz,处理性能可达150MIPS,每条指令周期6.67 ns,在高精度伺服控制等领域应用广泛。运动控制卡基本结构如图2所示。在此简易控制系统中,仅用到此控制卡的一部分功能。
 USB通讯接口采用的芯片为CH37fSS。此芯片内置了具有LS13通讯协议的基本固件,支持3种通讯接口:8位并口、串行外设接口或者异步串口。DSP可以通过任何一种通讯接口控制CH376S来与计算机通讯。本文的运动控制卡中串行外设接口和异步串口都已使用,因此采用8位并口的方式。使用时将}:H376 S配置为内置固件模式,此时芯片自动处理默认端点零的所有事务,并自动产生中断,DSP只需响应中断来进行数据交换,程序非常简洁。此芯片所需的外部器件仅为晶振和电容,硬件设计简单。 此外,CH376S还内置r具有针对海量存储设备的专用通讯协议的固件、SD卡的通讯接口固件.、FAT16和FAT1632及FAT1612文件系统的管理固件,支持常用的USB存储设备和s卡。因此,当USB端口不用做通讯接口时,可以改变USY中相应的程序段来满足其他需求,如可用来作为运动控制卡记录工业机器人末端轨迹的输出端口。 3 Mathematica中逆解运算 在机器人模型中采用D-H方法建立坐标系,这种方法精确定义了每个坐标系的坐标轴的建立方法,并定义了4个参数,这4个参数取决于相邻两杆之间的结构参数、运动参数和运动形式。所建模型的D-H参数见表1。
 由这4个参数可以确定相邻两连杆间的位姿变换矩阵,通过依次进行变换,末端执行器的位置和姿态可以用基座坐标系表示。对于运动学正解,只需将各位姿变换矩阵连续右乘即可,即
 设计的通用工业机器人模型包含6个关节,为了使得逆解的算法更加简单快速,模型采用后3个关节相互正交的结构。这种结构使得模型具有封闭解,使得机器人的逆解可以采用多种不同的方法,如反变换法、几何法和Piper解法等,本文采用的是反变换法。
 解的选取步骤为:(}}将所得的解放入一个6行8列的矩阵巾,对每个角度值进行预处理,使得每个角度值都处于机器人每个关节运动范围之内。(2)对于每一组解,计算与前一组解的各个角度差的绝对值之和。(3)加权平均后,值最小的那组解即为所求解。 4Mathernatica中运动轨迹仿真 工业生产中,机器人末端绝大多数时间内均运行直线或者圆弧轨迹,因此直线和圆弧运动为最基本的运动形式。为此,在Mathemaiica软件中,编写机器人模型直线运行和圆弧运行程序并进行仿真。 直线运行程序需要输入机器人.末端起始和终止位姿矩阵,根据起始点和终止点位置的远近以及两矩阵求得的等效转角的大小来决定直线运动中分割的点数。对每个分割出来的点进行逆解运算,所得的角度值用于进行电机控制。逆解所得的角度值在Mathernatica软件中进行正解运算,得到并显示所得的各个点的位置,来检查逆解运算是否正确。在Mathematica软件里,让机器人末端沿J轴运动100mm,直线运动仿真的结果如图3所示。
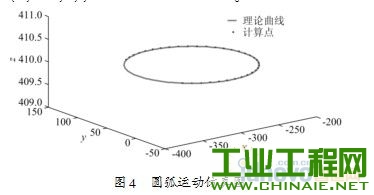
 圆弧运行程序需输人中间点和终止点位姿矩阵,起始点默认为卜一个程序的结束点,这与实际生产中的情况吻合。 根据起始点、中间点和终止点计算出圆心的位置,根据圆心与始末两点之间的扇形角,每隔设定的角度值就取一个点,得到分害」的点数。对每个点进行逆解计算,所得角度值再进行正解运算,得到并显示各个点。在Mathemati二软件里定义起始点位置(0 ,0,0),巾间点位置(100,0,0),终止点位置(0,100,0},仿真结果如4所示。 由图3和图4的仿真结果可知,末端轨迹按照所要求的直线或圆弧运动,程序正确。为减少机器人模型运动巾的抖动,设计了加减速程序。
 5 试验验证 电脑中编写USB通讯程序,即可实现与运动 控制卡的通讯,利用控制卡实现机器人的控制信号的产生,就可方便地组成一个简易控制系统,成本较低。 将Ma#hematica程序计算的结果,通过USB通讯程序传送进控制卡,控制机器人模型运动。在机器人末端固定一支铅笔,并在轨迹所在平面处放一张自纸,即可画出末端轨迹。试验结果表明,在误差允许的范围内,机器人末端沿所规划的直线或圆弧运动。 6 结束语 为了研究机器人运动及控制,本文设计了机器人模型系统,机械结构简单,加工成本低,控制系统利用电脑和控制卡组成,设计简单。仿真和试验结果证明,此模型可按照所规划的轨迹运行,为研究通用机器人的运动及控制提供了一个低成本、构造简单的平台。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

