|
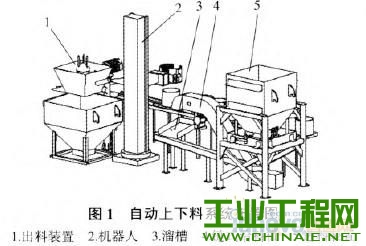
1 引言 某钢铁公司一合金厂共有十余条合金生产线,每条生产线主要设备由一座高温反应窑、一条环形运输轨道、配套气动、液压执行机构、电控系统及除尘系统等组成。产品原料为形状规则的四方扁豆形块料,用石墨圆柱形容器盛装,容器(外径×高)为西325mm×270mm,壁厚10(旧)~15mm(新),底厚15mm,容器筒身均布击5mm散热孔。装满原料后的容器重量为35kg,每个容器放在一个石墨方形20mm厚、带凹槽的托板上,容器由托板带动沿轨道排列依次被推入高温反应窑进行加热、保温,每l 5min左右从高温反应窑的出口被推出一副容器,原料经过焙烧制出成品粒料,出窑后容器和成品料重量共计20kg。因烧制温度较高(达1900℃左右),时间长,从而造成容器材料逐渐剥落、易裂,强度降低,使用寿命短(仅两个多月左右),而刚烧制出的成品料自身易粘连、板结,还不同程度地粘连在容器底部。原料在焙烧过程中会产生大量硫化物等有毒有害气体,虽炉窑上方配置有除尘装置,但整个车间仍弥漫着剌鼻的气味,车间环境温度也高达40℃以上,工作人员出入须配戴防毒口罩。改造前,对容器内板结的成品料用凿子捣散、成品料倾倒、原料填装、摇晃容器以使原料装填更密实等工作均为人工操作。 2 设计方案 为解决上述问题,我们为该企业量身设计了一套自动化上下料系统方案,该系统具有投资小、见效快、工艺设备先进、自动化程度高等特点,可实现生产车间自动化上下料、过程自动称量、自动统计计数、故障自动报警等功能,可实现生产过程数据与车间数据库对接,以便进行管理、分析、统计,对提高车间设备装备水平、节约劳动成本,改善工人生产劳动条件具有显著效果。 为尽量减少人员在车间生产现场的停留时间,在原车间集中装运成品料斗的基础上,增加了可供叉车装运的原料斗,将原用电瓶车从原料车间拉出原料在车间现场填充到容器的现状,改变为原料斗在原料车间集中装入原料,用叉车将原料斗置放于进料装置的支架上,人工放下位于原料斗底板的闸板即可,容器填充装料均由机器人完成。 为了满足车间自动化上下料的工艺要求,尽量利用工厂原有生产工、器具和设备,以减少改造期间因施工造成的停产损失及减少投资成本,本方案对原有系统工艺仅作少量程序上的修改,具体如下:原生产工艺为出窑要等两个容器一组上转盘机构后才从转盘拉上直行轨道,修改为每出窑一只容器就启动转盘将其推上直行轨道,在“等待位”等待进入自动上、下料工序。 3 自动上下料系统的设备组成及工作原理 自动化上下料系统主要配置有以下设备:机器人(含机械臂、机械手夹具)、出料装置、链式给料机、进料装置等,该系统布置图如图1所示。
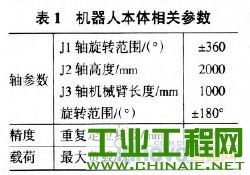
 3.1 机器人 本方案选择的机器人为三轴式机器人,主要由底座、立柱、机械臂、机械手夹具、传动机构、称重装置等组成。机器人为该自动化上下料系统的主体设备,其位于出料装置和进料装置中间,通过机器人机械臂上的机械手夹具实现对容器的装夹、旋转、卸料和装料等动作,完成自动化上下料动作,并实现自动称量和统计功能。机器人的动作和功能始终贯穿于整个自动化上下料系统各个生产步骤中,三轴均使用进口伺服电机和减速机驱动,动作精准到位,具有结构紧凑、重复定位精度高、反应灵敏等优点。 对该机器人的设计重点和难点在于机器人的机械臂上的机械手夹具的设计,因容器材料具有抱夹时易滑脱破碎等特性,设计了采取上卡、下托方式:即在夹具抱住容器的同时,夹具的上部卡住容器的边沿,在出料倾倒容器时能托住容器;而下托板是为承受容器的主要重量而设,减少了夹具抱紧容器的力度。刚出炉的容器表面温度为80℃,为防止夹具的直线导轨和运动部位过热,增加夹具和容器之间的摩擦力,特别设计了带缓冲功能的硅胶垫装在夹具的弧形内壁上,硅胶垫作为易损件可在线快速更换。为减少投资成本,采取固定臂长的方案,可减少机器人轴数。称量装置设置在J2轴的丝杠螺母上,对机械手夹具装夹的物品可实现称量。表1为机器人本体相关参数。
 3.2 出料装置 出料装置主要由中间料斗、振打装置、支架及成品料斗等设备组成。中间料斗用支架固定在成品料斗上方,主要功能为在成品料斗倒运期间不中断生产,将期间捣碎的成品料接住,以等待空的成品料斗到位。在中间料斗底部设置有推拉式闸板,处于常开状态,使得被捣碎倾倒出的成品料能顺利落到成品料斗中;只有当成品料斗料满后,人工将中间料斗推拉闸板关上,叉车将成品料斗拉走,换上空的成品料斗,再打开闸板。振打装置固定在中间料斗内部,用于将板结的成品料以振动打击的方式捣散,使料能全部落人中间料斗中。因容器材料特性,我们在设计自动化上下料系统时,对振打方式进行反复试验,使振打装置既能将成品料振动松散,力量又不能过大而损坏容器。振动装置的振打电机为变频电机,振打频率可任意调节,方便达到最佳效果。振打装置由减速电机、偏心凸轮机构和多头振打头等部件组成。 3.3 链式给料机 链式给料机位于生产线平行轨道旁,与轨道同向布置,作用是当机器人机械手夹具夹着容器转到装料位时,计算机发出信号,链式给料机启动,将原料输送至容器内,输送机为z型链式输送机,输送能力为0.8mⅦ,采用密封式.以防止送料时原料中的粉尘飞扬。链式给料机电机为变频控制,输送速度可调控。 3.4 进料装置 进料装置主要由原料斗、中间料斗及支架等组成。原料斗在原料车间装好原料后,由叉车将原料斗置放于进料装置的支架上,人工放下位于原料斗底部的颚式闸板,使原料斗中的原料直接进入到中间料斗中。中间料斗用门型架固定在链式给料机的进料口上方,能存储装9只容器的原料,使更换原料斗期间不中断生产。中间料斗下部为软管,链式给料机停止工作时,原料堵在软管里下不来,链式给料机启动时原料可通过软管不断地流进链式给料机进料口。当机器人机械手夹具运动至进料装置接料位准备接收原料时,PLc发出信号,链式给料机启动,为容器装填原料,在装料过程中,机械臂在水平方向作一定幅度摆动,使原料装填更加密实。 3.5 溜槽 溜槽的主要作用是接收从链式给料机出料口洒落出来的原料,让其回流到给料机进料口。溜槽位于进料装置中间料斗下部,箱型机构,箱体上下各开一个圆孔,软管由上孔嵌入到箱体里面,下孔凸缘嵌入到链式给料机的进料口里面。溜槽前面采用敞开式,便于清扫淤积在槽内的原料。 4 机器人的动作和功能 机器人机械手夹具得到指令从“等待位”出发,经卸料、装料、将容器送回夹持位、回到“等待位”为一个运动周期,正常情况为(不包括处理过程发生的容器破碎等意外情况)一个循环周期,远远大于生产线15min的生产节奏,为人工干预等情况预留了足够的空间。机器人采用PLC控制,与原生产线PLC系统通过以太网通信,具体动作和功能如图2流程图所示。
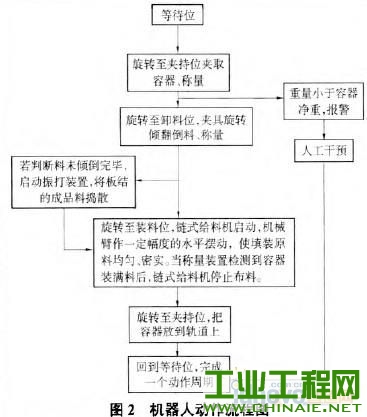 自动化上下料系统生产节奏为5min,也即该机器人的运动节奏。该系统正常生产节奏如下: 等待位→旋转至夹持位夹取容器并称量(0.5min)→旋转至卸料位,夹具旋转倾翻倒料,并称量(0.5min)→若判断料未倾倒完毕,启动振打装置,将板结的成品料捣散(2min)→旋转至装料位,链式给料机启动,机械臂作一定幅度的水平摆动,使填装原料均匀、密实。当称量装置检测到容器装满料后,链式给料机停止布料(1.5min)→旋转至夹持位,把容器放到轨道上(0.5min)→回到等待位,完成一个动作周期。 5 结论 该车间经过上下料自动化改造后,现场十余条生产线的生产状况可实现计算机统一监控管理,当原料成品料需要倒运或者发生故障报警时,才需要工人前往现场处理。每条生产线的原料上料操作工序可减少工人在车间停留时间30min左右,可减少劳动力约3人左右。另外,由于设计了原料斗,每斗原料可以持续使用超过12h,故夜间无需倒运,可减少夜间值班人员的数量。自动上下料系统的应用,对该企业改善车间作业环境,降低劳动力成本有着显著的效果。随着国家对于企业生产环境、劳动保护等方面的法律法规日益完善,劳动力成本在日益增加,智能化机器人在制造业特别是钢铁行业一些环境恶劣的生产现场有着广阔的应用空间。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


