|
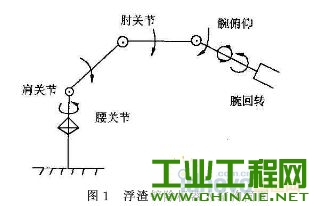
1 浮渣铲除机器人的结构 我国目前冶炼厂中的浮渣铲除都是由人工完成的,工人劳动单调乏味,而且作业环境恶劣,高,am,多粉尘、空气质量差。为此设计制造了一种5自由度、全电动、连续轨迹示教空间关节型机器人。 图1为浮渣铲除机器人结构简图,该浮渣铲除机器人系统由机器人本体控制部分和示教盒3部分组成。本体是机器人的主体,由它完成铲除浇注合金表面的渣滓皮层,控制部分通过驱动装置完成机器人本体的操作控制和监测,由示教盒进行示教。其中腰肩以及肘关节用干确定机器人点、位置,腕俯仰、回转关节用于确定腕部的姿态。以往的集中控制和混合控制很难满足要求,取而代之的是主从式控制和分布式控制结构。
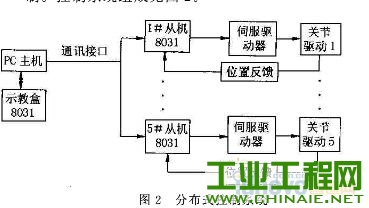
 2 浮渣铲除机器人分布式控制系统 分布式控制系统(DCS-Distrihuted Cnntrol system)是20世纪7(1年代迅速发展起来的先进控制技术,是汇集计算机技术、通讯技术、CR T显示技术和自动控制技术于一体的综合性高技术产品,分布式控制系统在适用范围、可扩展I陈控制速度、系统模块化可维护性、抗单点故障等方面明显优干混合式和集中式控制系统所以现代机器人控制系统多采用分布式控制结构,它包含多个CPU,采用微机芯片构成上、下两级。 2.1 硬件结构 浮渣铲除机器人为多关节结构,为了满足控制精度采用分布式控制系统。该系统由1台主机和5台接点机组成,采用上、下位机两级结构。上位机(主机)采用工业}c机,在控制系统中主机负责整个系统管理、人机对话、坐标变挽轨迹插补运算、各从机之间协调及故障检测。下位机(从机)由6个8L?31单片机组成,其中5个用于5个关节电机伺服控制,每个微处理器控制一个关节运动,它们并行地完成控制任务,控制机器人各关节的回转、俯仰等动作,因而提高了工作速度和处理能力;另外1个用于示教盒控制。控制系统组成见图2。
 主机PC机现在国内已相当普及机开发工具目前很全,而且价格低廉。从机8D31单片由5个单片机组成的5个关节控制系统全部由PC机的62总线设计成标准化选件板,它们和主机组成一个机器人弱电控制系统。而5个关节的电机伺服单元和强电控制线路安装在一起组成强电控制装置,机器人各部分的控制选件插板通过数据线和强电控制装置及机器人本体相连。此系统结构紧凑,特别是对浮渣铲除机器人本体设计更改方便,所以其控制系统具有较强的灵活性和通用性。 示教盒的硬件结构是以8031芯片为核心的单片机系统,外围接显示屏、键盘及通讯模块等硬件设备。操作者可利用面板上的按键开关操纵机器人各关节使之完成预期的轨迹,并可输入机器人作业程序。显示输出由LED数码管构成,显示内容包括控制系统当前工作状态、机器人位置正在纳行的命令、出错信息等 在作业过程中,控制系统控制周边装置使之与机器人协调动作,并接收机器人内部传感器信号。周边设备的管理由上位机完成,内部传感器信号则分别被送往上级机和关节控制单元。 主控单元与关节控制单元信息处理单元及示教盒系统间均采用串行通讯,主控单元与它们之间的通讯由一个全双工异步串口实现控制器与周边装,机器人本体内部传感器的所有兀勺均经光电藕合隔离,以减少电藕合干扰。设计专门的泊接口板完成信号的放大、隔离整形等功能。 2.2 关节伺服 工业机器人的控制主要包括机器人的动作顺序、应实现的路径与位置、动作时间间隔以及作用于对象上的作用力等。因此工业机器人有3种控制方式:位置控制、速度控制和力控制。在浮渣铲除机器人中,只需要进行位置控制和速度控制。 浮渣铲除机器人的5个关节驱动采用直流伺服电机,电机是码盘测速电机驱动电机一体结构。由码盘中A, B两码道来的位置信号经光电隔离器引入从机系统,该信号经整形辨向可逆计数器输入8f>31作为伺服单元的位置反馈量。8f)31采用双字节运算,通过和主机送来的位置给定进行比较形成位置偏差,通过位置调节器控制算法计算。该控制量经过12位D/A转换器转换成模拟信号,经电平转换和放大输入给关节伺服单元作为速度调节器的给定,从而实现关节电机的位置闭环,采样时间为Zm}3ms。为了避免可逆计数器错误以及提高位置反馈量检测的抗干扰能力,计数器计数时采用时钟脉冲进行同步,将计数锁存与8031时序同步起来。另外,从机要对位置给定进行平滑处理.以满足机器人运动时关节平滑的要求。 2.3 主、从机通讯 浮渣铲除机器人是一个多处理器控制系统,在技术上要解决多CPU之间的信息交换。在此系统中,单片机间的通讯方式采用串口通讯。因为并口通讯先进先出堆栈((FIFO )属于所谓的紧藕合,虽然通讯速度快,但结构较复杂,不适宜作远距离通讯。串口通讯为松藕合,虽然数据传输效率较低,但结构简单,可作远程通讯。 浮渣铲除机器人控制器采用异步方式进行串行通讯,因许多单片机芯片内部都集成有全双工异步串行口,这样数据的发送和接收可同时进行。而且利用串行通讯可直接实现主处理器与多个从处理器8C?31间的通讯。 2.4 软件体系 在控制软件单元中,将机器人的工作状态分为归零示教、编辑及再现等工作状态。软件设计采用模块化结构,以改善可读性和易维护性,且缩短了调试时间,又便干将来的功能扩展。主控软件分为主模块、任务模块和功能模块,见图3。
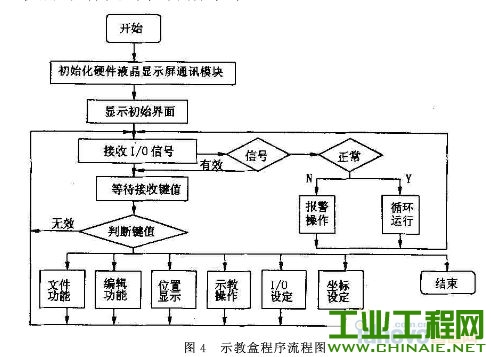
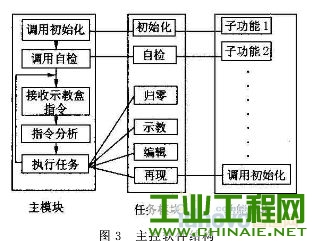 初始化模块是对系统的可编程芯片进行编程,开辟系统缓冲区,建立软件标志等。自检模块完成整个控制系统的自检和自诊断。在归零模块中,机器人主控单元向关节控制板发出指令,使所选关节归零,即关节到达由机器人内部传感器确定的一个基准位置们在示教模块中根据用户指令产生相关的关节动作指令,将指令传送给关节控制板,并接收关节控制板的回送信息,还可以将机器人所希望的关节坐标位置记忆下来。在编辑模块中,操作者可离线修改示教记忆关节空间的坐标值,也可修改示教记忆的路径。在再现模块中,控制系统对作业进行动作规划,生成机器人路径。主控系统根据作业性质控制周边装置,或基于感觉信息处理结果执行某些智能任务。 示教盒系统软件由键盘和显示器的驱动程序、示教方式下的轨迹规划算法程序和示教通讯程序组成。示教盒上电后,首先对硬件进行必要的初始化然后显示主菜单,一切正常后,操作者即可进行机器人的操作,利用示教盒输入作业要求。示教盒程序流程图见图4。
 3 结束语 在浮渣铲除工业机器人控制系统中,采用分布式控制,有效地提高了控制的精度和速度,从微机应用和控制角度来看具有实际意义,可以应用于机床控制、多关节机器人和多路通讯等众多场合。总之,工业机器人分布式控制系统是一种比较理想的快速实时控制系统。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


