|
单轴机器人可配置高精度交流伺服驱动器和伺服电动机,采用精密滚珠丝杆或同步带作为传动件。具有精密、坚固、运行平稳、定位精确、结构简单、噪声小、使用清洁、控制方便等多种特点。 单轴机器人、机械臂在液晶面板、半导体、家电、汽车、包装、点胶机、焊接、切割等具有定位、移载、搬运的自动化领域有着广泛的应用。 单轴机器人、机械臂由机械部分、传感部分和控制部分这3大部分组成。这3大部分又可以分成控制系统、驱动系统、感受系统、机器人一环境交互系统、人机交互系统和机械结构系统这6大子系统(见图1)。而控制系统和驱动系统是单轴机器人、机械臂的核心控制技术。
 图1单轴机器人基本组成 1 概述 传统单轴机器人、机械臂的控制系统由人机界面+单轴位置运动控制系统+可编程逻辑控制器(PLC)+伺服驱动器+伺服电动机组成(见图2原方案一和原方案二):单轴位置运动控制系统根据运动控制的目标位置进行运动控制计算,计算出目标运动位置,输出脉冲指令给驱动器,再由伺服驱动器驱动电动机运转,进而带动机械结构运行。
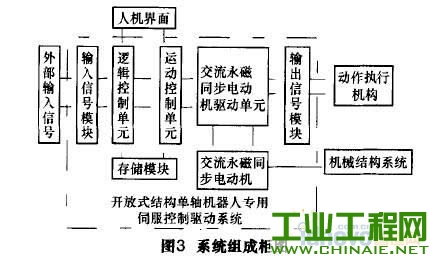
 图2方案比较 传统的单轴机器人控制系统有结构复杂、系统成本高、接线繁琐、可靠性差等自身缺点,越来越不能适应单轴机器人、机械臂的快速发展要求。而基于开放式结构的单轴机器人、机械臂专用控制系统就可以很好的解决这一系列的问题,系统将单轴机器人、机械臂所需的可编程位置控制和伺服驱动功能在一个系统中集成,大大提高了整个系统的可靠性、可维护性和抗干扰能力。 我们在KT系列伺服驱动器的基础上开发了具有开放式结构的单轴机器人、机械臂专用交流同步电动机伺服控制系统(见图2新方案)。 2 单轴机器人、机械臂控制系统介绍 具有开放式结构的单轴机器人、机械臂专用交流同步电动机伺服控制系统具有结构开放、软件功能集成、外部模块可扩展、强大的实时通讯和丰富灵活的编程语言等多项优点。 整个系统由可扩展输入输出信号模块、可扩展存储模块、PLC(逻辑控制单元)、运动控制单元、交流永磁同步电动机驱动单元组成。具体组成框图见图3。
 2.1 系统特性 (1)使用32位高性能CPu,实现高精度、高速度单轴机器人、机械臂的伺服运动和逻辑控制; (2)具有灵活的点对点直接位置编程模式; (3)具有自学习位置编程模式; (4)具有自动位置加减速运动控制功能; (5)具有标配8输入4输出可编程多功能输入输出口; (6)具有可扩展可编程多功能输入输出口; (7)具有可扩展存储模块; (8)具有完善的保护功能(有过流、过压、欠压、位置超差、编码器信号异常等多种报警保护); (9)具有Rs485通讯接口(符合MODBUs—RTu通讯协议),可通过与上位机连接,实现网络控制、参数设定、现场监控等多种通讯功能; (10)内置制动回馈能量电阻。 2.2 系统功能 (1)可编程输入输出接口(可扩展) 可编程单元有8个可编程多功能输入信号和4个可编程多功能输出信号:每一个输入与输出信号都可以根据参数设置来选定其功能;同时每一个输入与输出信号的有效信号(高电平、低电平、上升沿、下降沿)都可以根据用户的需要来设置。这样做极大地提高了系统的灵活性,为用户的操作提供了极大的便利,也提高了系统对于不同外围硬件的适应性。同时可编程输入输出接口的数量可以通过系统总线进行扩展。 (2)指令系统 整个可编程单元有着丰富的指令系统,提供了100余条指令供用户编程,可以灵活地实现用户的功能;整个指令系统有运动控制指令、跳转指令、逻辑运算指令、算术运算指令、比较指令、中断控制指令、子程序调用指令、定时指令、输入输出指令、平滑过渡指令等多种类指令为用户的不同控制需求提供了保障。 (3)中断优先控制 整个可编程单元有十六级不同优先级别的中断,每一级中断可以由任何的一个输入信号来触发,这样保证了系统中断的灵活性。也使用户的编程有了更多的选择,为实现较复杂的控制功能提供了强有力的保证。 (4)通讯功能 整个系统还提供了RS485通讯功能,整个通讯协议严格遵循MODBUS—RTU通讯协议;可以通过基于Pc的软件来对系统编程并监控单轴机器人、机械臂的运行工作状态;整个通讯系统还可以连成网络,实现对单轴机器人、机械臂的联控与群控。 3 系统的设计和应用实现 在实际应用中单轴机器人、机械臂的系统设计采用逻辑工位规划、运动控制轨迹规划、系统编程、系统仿真和现场调试这5个步骤来实现(如图4所示)。
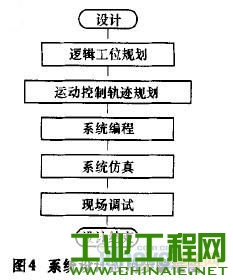 3.1 逻辑工位规划 运用开放式结构单轴机图4系统设计应用步骤框图器人伺服控制系统进行系统架构时,整个系统应采用模块化的理念进行设计,即将一个完整的生产序列根据工艺顺序进行多层次的分解,形成多个工作单元,同时要确保每个工序单元在实施方式上、空间布局上以及生产节拍的组织上适合单轴机器人完成每个工序单元的生产任务,以及和上下游的其他单元形成有序配合,这种配合体现在多工位之间能实现有序联动,统一生产节拍。所以在设计应用之初要进行逻辑工位的规划。 连续生产的常见的工序工位组织方式有环形工位和直线形工位,如图5所示。
 开放式结构单轴机器人伺服控制系统内置64段可编程位置运动程序(P00一P63),通过扩展的程序存储模块可以扩展到4K段的位置编程容量;内置的64段可编程位置运动程序,可以通过6个可编程多功能输入信号定义为位置选择信号(PIN0一PIN5)来选择位置,并配以START位置启动信号来触发启动。扩展外部位置编程容量,可以通过扩展可编程多功能输人信号来选择并触发启动。 编程位置运动程序段除了可以通过输入信号来选择并启动外,还可以通过485通讯和内置PLC程序来调用,可以适应不同种类的单轴机器人应用。 3.2 运动控制轨迹规划 (1)开放式结构单轴机器人伺服控制系统提供了表1所示的参数用来规划运动控制轨迹。运转形式设定参数可以设置运转的坐标系、S曲线、定位方式多种规划模式。
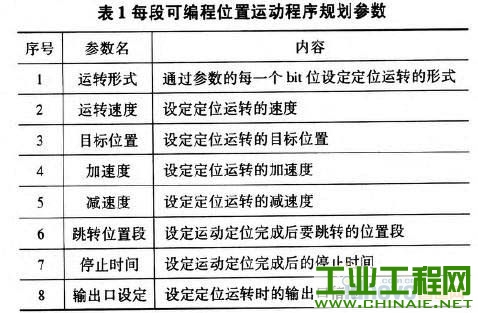 (2)开放式结构单轴机器人控制系统除了可以用 参数规划轨迹外,还可以用图6所示的图形界面来进行轨迹规划。
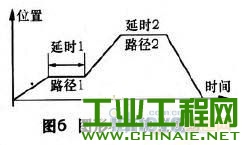 3.3 系统编程 (1)可以通过计算机专用编程软件进行编程 目前采用灵活的点到点直接位置编程模式,只需输人目标位置的坐标和运行速度即可完成一步点到点的位置编程;同时可以在位置指令间插入PLC图6图形界面轨迹规划(可编程逻辑控制)指令,实现运动控制和逻辑控制的完美结合;在完成指令编程后可以通过指令编译、目标连接,形成可执行代码,并通过485通讯下载到控制系统中(如图7所示的软件编程界面)。
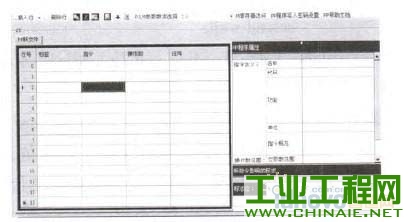 图7软件编程界面(2)示教模式编程 可以通过系统自带示教功能,在现场通过操作人员的点动运行,来示范位置运动轨迹,此时系统将记录整个运动轨迹;在点动运行结束后,计算机专用编程软件将根据系统记录的整个运动轨迹,自动生成位置运动控制指令程序。同时现场编程操作人员可以通过计算机专用编程软件,对自动生成的位置运动控制指令程序,进行编辑修改和优化。最后通过485通讯将生成的可执行指令代码下载到控制系统中。 3.4 仿真模式 在完成编程后,可以在计算机专用编程软件上通过现场在线的指令生成运动轨迹波形图来验证编程的正确性和可靠性;同时可以在仿真模式下,实时在线修改控制系统中的程序,大大方便了现场用户的调试和应用。 3.5 现场调试 在现场调试中,具有开放式结构的单轴机器人、机械臂专用交流同步电动机伺服控制系统可以通过系统提供的各种调试功能,进行如下步骤的调试:(1)回原点运行调试;(2)点动负载运行调试;(3)系统试运行调试;(4)通过计算机监控软件记录外部输入信号,同时记录系统运行轨迹和输出信号。根据外部输人信号和不同的运行轨迹以及输出信号来判断系统的运行准确性。 4 应用结果 具有开放式结构的单轴机器人、机械臂专用交流同步电动机伺服控制系统在实际的应用中比传统的单轴机器人、机械臂的控制效率明显提升,可靠性也有了显著的提高,功能更完善,保护措施也进一步提高,系统成本也明显降低,完全达到了国外同类产品的先进水平。图8和图9为现场应用情况。
 5 结语 随着我国伺服驱动器在工业控制与自动化领域的广泛应用,具有开放式结构的单轴机器人、机械臂专用交流同步电动机伺服控制系统,在一些集成度要求较高的单轴机器人、机械臂的控制领域,具有经济、有效和实用的控制效果,有着较为广阔的应用前景。相信在不远的将来,该控制系统必定会在各种机器人自动化领域取得更为广泛的应用和显著的经济效益,为我国先进装备制造业做出更大的贡献。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09
 /1
/1