|
0 引言 目前大多数碰撞检测方法都是通过物体的描述模型,直接针对三维物体进行的,如:八叉树法、离散矢量法、包容盒法㈨和扫描体法等。这种在三维物体间直接进行碰撞检测的计算量较大,有时为实现碰撞检测过程的可视化,不得不借助于高性能的图形工作站。为提高碰撞检测的效率,Cliffor A.Shaffer作出了有意的尝试。他在机器臂碰撞检测系统中采用八叉树模型来划分物体的运动空间,而非描述物体本身,使碰撞检测能够直接推进到可能发生碰撞的空间,提高了碰撞检测的效率。 本文以CRT工业机器人控制代码的图形验证为目的,以个人计算机为硬件基础,以降低碰撞检测过程的复杂程度为指导原则,从运动环境的角度出发,开展了碰撞检测方法的研究。 1 碰撞检测 如图1所示,三津公司的玻璃壳搬运用工业机器人是一种结构类似于SCARA(SelectivelyCompliant Arm for Assembly)机器人的操作机。一般的SCARA机器人的结构特点是具有两个平行的回转关节,其回转轴线a-a和b-b垂直于机座4的安装平面。大臂2和立柱3组成一组圆转关节,小臂1和大臂2组成另一组回转关节,且其轴线俨口平行于b-b。导柱5与小臂的滑套组成一组滑动关节。当驱动系统通电后,大臂和小臂分别绕轴线a-a、b-b旋转,导柱沿轴线rf作上下运动。而三津公司CRT生产线上的工业机器人与传统SCARA机器人不同的是:取消导柱5与小臂的运动,增加了立柱沿轴线a-a的上下运动。
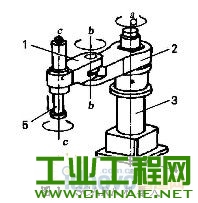 图1 SCARA机器人 1.1 最大运动范围的分层处理 受Cliffor思想的启发,同时结合CRT工业机器人的具体特点,提出并建立了CRT工业机器人最大运动范围的空间分层索引模型,如图2所示。
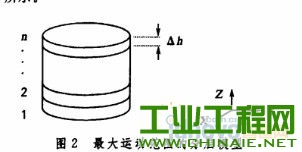 图2 最大运动范围的分层模型 模型的建立方法:将CRT工业机器人最大运动范围用形状为圆柱体的最小包容盒包围,包容盒坐标轴方向与机器人坐标轴方向一致;然后,用垂直于Z轴的平面(图1所示吸盘轴线c的方向与Z轴方向平行),按高度Ah依次划分,其中1到行为各层的ID号。 建立最大运动范围空间分层索引模型的目的主要有两个: (1)通过物体在模型空间中的位置,判断可能发生碰撞的空间(该空间由若干ID号标志),有效地避免了对各层的穷尽搜索,加速了碰撞检测的进程; (2)当△h足够小时,可将各层当平面看待。这样,三维物体的碰撞问题可以转化到各平面层内解决,降低了碰撞检测的复杂程度。 1.2 各层内的碰撞检测 在CRT工业机器人运动中,吸盘、吸盘轴和吸盘吸附的玻璃壳都可能与周围的其他设备发生碰撞。为使碰撞检测能兼顾运动环境中的各种因素,同时也为了叙述上的方便,作者提出了“吸盘联体”和“环境联体”的概念,即:将吸盘、吸盘轴和吸盘吸附的玻璃壳看作一个整体,而将机器人周围的其他设备及设施看作另一个整体,共同参与到碰撞检测中。就CRT工业机器人而言,吸盘联体可简化为一回转体,其回转轴为吸盘轴。 在机器人运动过程中,当吸盘联体和环境联体占据同一层仇时,可能有碰撞发生。可以通过吸盘联体和环境联体在柳层截面之间的位置关系判断:如果两截面相交,则在该层内有碰撞发生;否则,无碰撞发生。具体判断方法如图3所示。
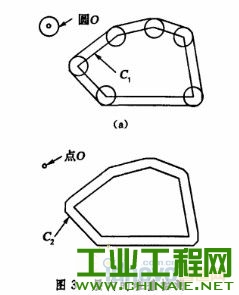 图3 层内的碰撞检测 图3(a)中,圆。和曲线C-分别是吸盘联体和环境联体在m层内截面的轮廓曲线。图3(b)中,圆。收缩成吸盘轴上一点o,曲线C。相应的放大成C2。具体放大方法是:让圆。的圆心在C,上运动,将圆0的外包络曲线C2作为C。放大后的曲线。通过这种措施,可将圆O和C。的碰撞问题转化成吸盘轴和m层的交点0与轮廓曲线C。之间的碰撞问题。这样,只需判断点0的坐标(z,y)是否在曲线c2内即可,降低了碰撞检测的复杂程度。 1.3 层内点与封闭曲线的位置关系 为充分保证生产过程的安全性,规定只要点和曲线发生接触,就有碰撞发生。具体计算过程分粗判和精判两步进行: (1)粗判。该步骤的目的是为了减少不必要的精确计算,加速碰撞检测的进程。判据如下:
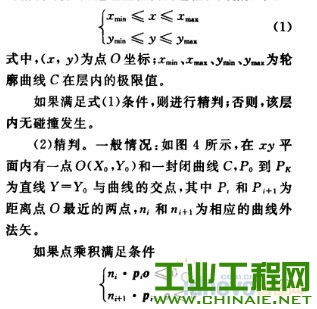
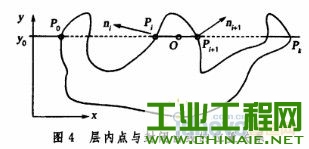 图4 层内点与封闭曲线的位置关系 则,表明点。位于曲线C上或曲线的封闭范围内,即有碰撞发生;否则,无碰撞发生。特殊情况:直线Y—Y0与曲线无交点,则没有碰撞发生;直线y=Y0与曲线有且只有一个交点,即直线与曲线相切时,发生碰撞。 1.4 算法描述与分析 在最大运动空间分层索引模型的基础上,开发了CRT工业机器人碰撞检测算法,如图5。图中,x-Zmax为吸盘联体在2方向上的最大值,^-Zmin。为环境联体在Z方向上的最小值,Zmax与Zmin表示机器人在z方向上的运动范围。 具体碰撞检测算法用伪码描述如下: int IDmax;//可能发生碰撞的最大ID值 int IDmin//可能发生碰撞的最小ID值 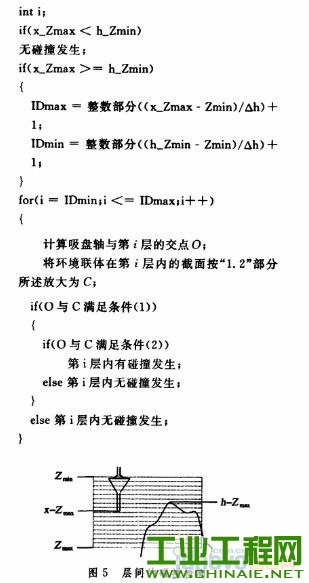 图5 层间的碰撞检测 至此,可以根据算法的计算结果判断控制代码是否有碰撞发生。 为实现整个运动过程的碰撞检测,需将相邻两行控制代码之间的位置细化成多个吸盘联体的运动位置(步长Aa可调),然后对细化后的每个位置应用本节中的算法进行碰撞检测。通过调整分层高度Ah和细化步长Aa,可以方便地改变碰撞检测的效率和精度,即Ah和△n越小检测精度越高,所需时间越长。 2 验证实例 图6为CRT工业机器人碰撞检测效果图。碰撞检测所需要的数据,单位为mm。 (1)最大运动空间(圆柱体): 圆柱体底面圆心:(0,0,900) 底面半径:1 000; 高:500; (2)分层高度:1; (3)测试代码:
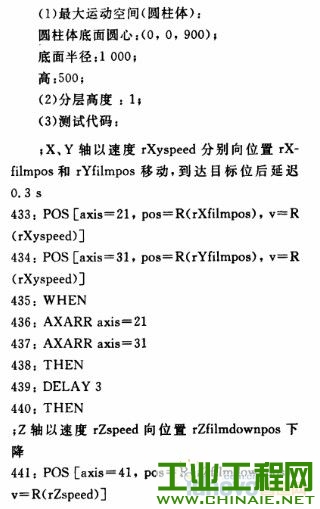 其中,rXfilmpos=4 000脉冲,rYfilmpos=5 000脉冲时,有碰撞发生;rXfilmpos=4 300脉冲,rYfilmpos=6 700时,无碰撞发生。注意,这里的位置是控制代码中的原始数据,它来源于电机光电编码器,因此,单位是脉冲。作碰撞检测前,还需要根据CRT工业机器人的空间几何结构,将其换算成笛卡儿空间坐标值。 (4)细化步长:3; 根据碰撞检测信息,441行代码引起玻璃壳和环境之间的碰撞,碰撞情况如图6(a)所示。虽然,碰撞发生在代码441,但原因是由于433、434中X、y轴没有摆到正确位置所至。通过修改rXfilmpos和rYfilmpos的值,可将碰撞消除,如图6(c)所示。
 3 结论 本文介绍了CRT工业机器人控制代码的碰撞检测方法,应用于CRT工业机器人虚拟图形验证系统,证实是一个高效的解决方案。在碰撞检测上,降低检测的复杂程度是基本指导原则,采取的措施有: (1)机器人最大运动空间分层索引模型的建立; (2)各层内轮廓曲线的收缩与放大。 在这些措施的基础上,将三维物体的碰撞问题转化为判断平面内点同曲线之间位置关系的问题。由于该方法从运动环境的角度出发并且以微机为硬件基础,因此,碰撞检测的结果更加可靠,且有利于其推广应用。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1