|
0 引言 传统工业机器人是根据给定任务和已知环境进行结构设计,并由专用语言编写控制指令,通过固化在专用控制器上来控制工业机器人的运动;一旦要求改变机器人的运动逻辑顺序时。就要对工业机器人的控制器进行重新编程、调试,甚至重新设计机器人机械结构和控制器结构,于是便产生了传统工业机器人设计周期长、成本高、系统维护困难等一系列问题,给工业机器人在工业生产中的应用带来了很大的局限性。因此,是否能着眼予全局,从理论上找到一个通用的机械系统和控制系统设计方法,而不是局限于某个具体问题,使工业机器人能在现有硬件和软件条件下根据用户各种不同任务和工作环境自动形成作用于本体的底层控制指令序列。成为当前工业机器人领域的一个研究重点。而寻找出适合我过国情的工业机器人研究思路,开发出成本低、性能较好的实用型工业机器人更是我国工业领域内机器人探索的一个方向。文章基于普通Pc机、利用VB设计了人机界面,作为接收作业任务的上位机。利用三菱PLC作为机器人的底层控制器,设计了具有根据上位机下传的任务自动形成用户控制逻辑功能的软件系统。 1 SCAF沮工业机器人结构分析 SCARA型工业机器人主要实现的是水平作业,所实现的功能主要是水平面上的旋转运动,构型特点是几个关节旋转轴带动水平手臂实现水平旋转作业口;文中采用的SCARA工业机器人除了具有基本的水平关节运动外,还有垂直方向上的丝杠运动和终端治具动作,总共4自由度,其结构形式如图1所示。
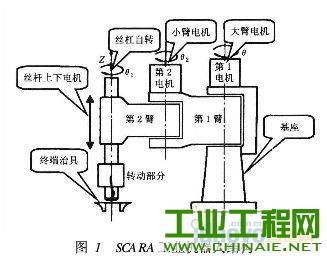 图1 SCARA工业机器人结构 SCARA工业机器人中需要控制的对象有: 1)大臂驱动电机1。采用400 w的伺服电机1与减速器联接后固定在基座上,将运动和动力传至大臂,驱动大臂相对于基座的运动。 2)小臂驱动电机2。采用200 w的伺服电机2与减速器联接后固定在大臂终端,将运动和动力传至小臂,驱动小臂相对于大臂的运动。 3)丝杠自转驱动电机3。与丝杠联接的杆件沿轴向加工槽,杆套与杆件之间通过滑键联接。由100w的伺服电机3直接驱动杆套的旋转运动,从而带动杆件的自转。 4)丝杠上下驱动电机。丝杠与螺母的运动关系为:螺母做旋转运动,丝杠做直线移动。由100 w的伺服电机4直接驱动,将运动和动力传至螺母。 5)终端治具电磁阀。采用汽缸直接驱动夹具的运动,由电磁阀控制汽缸的运动油。 针对SCARA工业机器人以上的控制对象,本文将在下节做详细的控制系统设计。 2 下位机系统设计 2.1 硬件配置 本文所采用的4自由度伺服驱动可重组工业机器人试验样机的控制系统分为上位机和下位机2大部分。上位机是在普通PC机上编写的人机界面软件。下位机主要由三菱的PLC和伺服系统构成,上、下位机通过485总线通信。系统总图如图2所示。
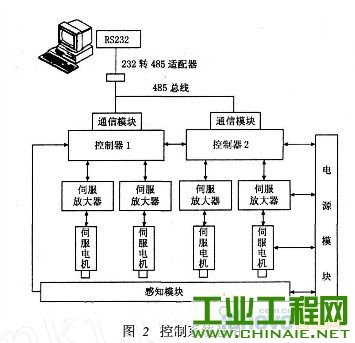 图2控制系统总图 本机械手的4个自由度需要由4个电机驱动,而一个PLC最多能带动2个伺服驱动系统,因此我们配备2台PLC控制4个伺服系统。为了能构成1:N通信线路,实现一台计算机控制2台PLC,选用相对简单、可靠而又低成本的485通信方式。由于计算机主机上安装的是骼232串口,所以在计算机主机上加上Rs-232/Rs485的适配器进行通信协议的转换。由于每个动作模块之间有着相应的联系和规则,而这些动作是分散在2个PLC上控制的。因此,PLC与PLC之间也有通信;但是485总线在同一时刻不能有两帧数据在传输,故他们之间不允许占用总线进行通信。考虑到他们之间只有简单的开关量通信,而且通信的时机是分开的,故这里可以通过他们的L/O口进行2台PLC的交流。另外,为了确保机器人动作的准确性,驱动部分采用具有闭环控制功能的伺服系统。控制器通过通信模块接收来自上位机的动作参量,并对参量数据进行分析,经过具有控制逻辑自重组功能的算法进行耦合,最后通过伺服驱动系统输出动作。 2.2 软件设计 下位机采用三菱PLC作为主控制器,PLC中程序设计分为2大部分,一是主控程序,主要负责系统状态的检测、上位机任务的接收与解耦和子程序的调用。二是子程序,主要负责具体任务的执行,如各个轴电机的直接驱动命令及各重开关量的控制(这里有终端治具的控制)。控制系统的软件流程如图3所示。系统上电后,等待人启动开始按钮,系统启动后,首先进行各种状态的检测,包括伺服Ready信号,气源气压检测等。系统状态检测正常后,开始等待用户输入作业任务。收到作业任务后开始对任务进行解耦,提取出各个运动参数及控制逻辑信息,最后调用各个运动类型对应的子程序,驱动并控制各个电机及电磁阌。工业机器人所有的作业任务均由用户在离线状,通过本文设计的人机界面下传之PLC。下节,将对人机界面功能做详细介绍。
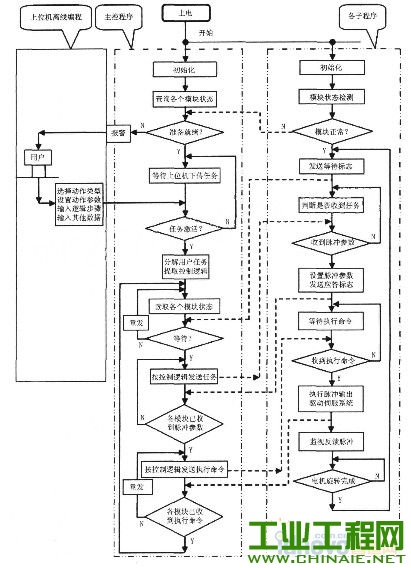 图3软件流程图 3上位机人机界面设计 利用Visual Basic,在普通Pc机上根据控制功能对人机界面进行了具体的设计。界面内容如图4所示。通过该界面。用户可以对SCARA工业机器人的各个控制对象进行运动的离线规划,布置任务。任务布置的内容有:动作类型选择(电机及其旋转方向)、动作行程(脉冲数)、动作速度(脉冲频率)、动作延时时间、动作逻辑、有无循环及循环次数等,点击“程序写入”按钮即可将用户总任务下传至控制系统。下位机还可以将机器人的各种状态通过人机界面提示给用户,如上电后控制系统对工业机器人各个关节的状态及系统的状态等。下位机通过人机界面接受用户对工业机器人各个运动关节的位置矫正,以及用户对运动过程中各个模块的参数查询。
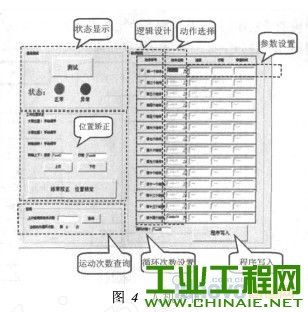 图4人机界面 上位机与下位机之间的任务协议采用本文约定的规则,由指定的辅助继电器M和断电保持寄存器D代表动作类型、运动参数、动作延时时间和循环次数等。本文规定的协议如图5所示。其中,数据帧协议格式采用三菱公司的PLC计算机链接协议。
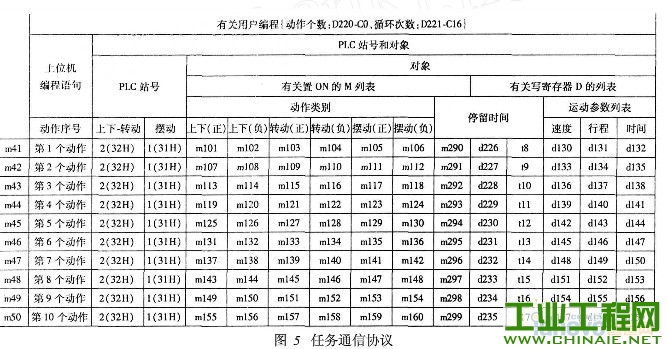 图5任务通信协议 4 结束语 SCARA工业机器人是由多个机械运动模块和连接模块构建而成的。本文设计的SCARA工业机器人的控制系统已经在样机上通过程序调试。上位机通信方面,通过串口调试助手对用户参量数据的监视发现,所有的数据全部正确,均符合预先约定的通信协议规则,且通信没有出现滞后和乱码。下位机方面,在把监视到的正确数据通过串口调试助手下传至下位机后。下位机中各种动作模块能按照上位机设定的逻辑准确无误地组合,发生意外情况时对应的动作模块和报警均正确、快速地作出了反应。最后我们将上、下位机按照系统配置图正确连接,整个系统运行稳定,动作执行正确无误,实验数据和机器人动作状态均表明,下位机控制系统的各个功能模块成功地实现了脱离开发环境进行自由组合,具有很实用的面向用户的开发性。下一步,将对样机的电气线路进行合理的布置设计,做到走线合理、无干涉。同时,进一步研究5轴和6轴时控制系统的设计。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09
 /1
/1