|
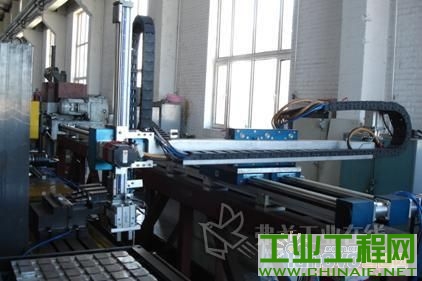
第一组为:一维导轨机器人(DTL060.300.500),负责上料工作。水平运动行程500mm,运动速度为300mm/s,负载20KG,重复定位精度为0.05mm。驱动部分采用Panasonic 400W交流伺服加德国NEUGART,PLE60-8减速机。 第二组为:四维导轨机器人,X-Y-Z三自由度直线运动,一旋转轴R轴安装于Z轴之上,其旋转轴线与X轴方向平行,气动手抓安装于旋转轴之上,方向朝下抓取工件,可实现工件三维直线运动和一维旋转运动。 X轴行程3400mm,Y轴行程600mm,Z轴行程200mm,R轴行程+/-180o X轴速度600mm/s,Y轴速度300mm/s,Z轴速度200mm/s,R轴速度90 o/s X轴选用双根龙门式导轨机器人(DTL060.300.3400) Y轴选用单根龙门式导轨机器人(DTL060.300.600) Z轴选用单根抓取式导轨机器人(DTV060.300.200) R轴选用德国MOTEC步进电机直接驱动,扭矩为1.5Nm X、Y、Z轴的重复定位精度为0.05mm,R轴的旋转精度为5′负载为0.5KG(不含气动手抓及其附件) X轴选用Panasonic 400W 伺服电机加德国NEUGART减速机PLE60-8,Y轴选用Panasonic 750W伺服电机,Z轴选用Panasonic 400W加制动加 PLE60-5,R轴选用MOTEC电机SM368。 第三组为四维导轨机器人,除了X轴的行程为4200mm、Z轴行程为400mm,其余所有参数、型号、指标均与第二组导轨机器人一样。 第四组为一维导轨机器人水平运动行程200mm,运动速度为300mm/s,负载5KG,重复定位精度为0.05mm。 控制系统采用英国TRIO可编程运动控制器,整套设备共需8套伺服、2套步进,因为主要是完成各轴的配合运动和定位工作,所以选用3块 EURO205X集联的方式共开通10个脉冲通道,TRIO作为从站听从整个主控系统的协调和逻辑指令,完成搬运、翻转和各个机器人之间的配合。 第一组机器人负责上料。第二组机器人负责工料指定加工位置的码放位置,加工完毕后进行翻转去毛刺等工序,再码放在第二组和第三组的公共区域,由第三组机器人再取料、码放进行加工,再进行翻转,加工另一个表面,再依次翻转,完成4个表面的加工,再放入第三组和第四组的指定位置,由第四组机器人再把工件推入指定工位,由最后一台机床进行加工,整个加工过程完毕。
 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

