|
1 研究背景 长期以来,工业机器人一直是工业自动化中的一个嗽要环节。过去由于通信网络和管理技术的复杂性和高成本,尽管CIMS理论蓬勃发展,但是真正的“无人工厂”还只能是纸上谈兵,在大多数领域还只能停留在自动化牛产单元的层次而工业机器人往往就是这些自动化生产单元的核心,例如弧焊、点焊、喷漆、零件装配作业等等。随着控制技术的不断发展,随着信息技术的不断进步,尤其是网络技术、现场总线技术的发展,便得大规模的生产自动化成为可能。在这种车间级,T厂级的整体自动化生产中,工业机器人也由过去的核心单元逐渐演变成通用的标准工业设备,工业机器人的网络化和编程的自动化成为必然的趋势。 另一方面,在教学科研领域,由i:工业机器人控制器的非开放性,许多研究部门只能重新设计机器人控制器甚至木体,不仅成本高.而且由卜条件所限,很难达到现有工业机器人的性能,同时重复这样的开发也是一种资源浪费。我们设想可以在通用的计算机上进行高层的研究,原有机器人控制器实现底层运动控制,二者通过高速网络连接,只要不涉及伺服级的控制研究,可以使用标准工业机器人及其控制器作为执行单元,与自制设备相比,不仅节约成本和时间,而且工业机器人技术成熟,基本运动控制性能优良,尤其是可靠性好,可以保证研究工作的顺利进行。 目前网络技术和现场总线技术的发展是方兴未艾,现场总线,尤其是CAN总线在机器人上的应用研究越来越多。但是由于控制器的开放性问题.无法在上业机器人上实现。当前我国上业机器人市场的主流是日本安川、Fenuc和瑞典ABB等几种品牌,而这几种品牌的主流机型都没有提供网络和现场总线接口,仍然只有RS232等标准配置,而且这些接口主要用于机器人维护,数据备份等,在线实时控制能力不强。因此当前对机器人设备的刚络控制研究往往局限于自行研发的各种非标机器人,而作为工业生产主力军的工业机器人的网络化研究相对还比较薄弱。如何针对现有主流工业机器人实现网络化是一个很有现实意义的研究课题。 2 现有工业机器人的特点和不是 目前我国工业机器人的典型应用是以机器人为核心,通过PLC等时序逻辑控制器控制周边装置配合完成一定的作业,有些较为复杂的系统是由上位计算机控制整个作业的工作节拍,上位机与机器人的通信是通过一些简单的开关量完成的,主要限于一些启动信号、状态信号和条件信号等。机器人的运动程序都是事先编制好的,运动轨迹通过示教再现方式手工确定,通过简单的分支‘循环指令配合外部信号控制机器人动作时机和选择路径等。 这种控制结构有两个最主要的问题,一个是不具备足够的灵活性,一个是示教编程工作很繁琐,而且效率低。就灵活性而言,开关量信号所能传递的信息有限,只能控制运动启动时间和分支选择,机器人运动软迹都是事先确定的,这就要求机器人作业对象和周边环境都具有确定性,对前道工序的工艺要求(主要指公差)非常严格.对周边装置的定位精度要求也非常严格,即使最终产品并无很高的精度要求也不得不如此,这就大大限制了工业机器人的应用。而在实际工作中,由于无法精确控制某些不确定因素,经常需要机器人具有及时修正运动轨迹的能力。这就要求机器人具有强大的信息交换能力。 另一个方面,随着CAD/GAM技术的发展,制造业开始进人电子化、无纸化时代,从设计到制造都是计算机辅助实现,各环节之问都是电子图纸和文件往来,手捧示教盒的人工编程方式效率低下,已经不能满足需要。很多场合下没有实物或者模型以供示教使用,要求从电子图纸直接生成机器人工作程序。在工业机器人上实现CAM是必然的发展趋势,这也对工业机器人的网络化和自动编程提出迫切要求。 3 工业机器人网络化方案 由于进口工业机器人不具备开放性,不可能在其原有拎制器的基础上做太多的工作,我们设想在机器人控制器之外附加一台计算机作为上位控制器,实现一种“大脑+小脑”的控制模式。也就是用卜位计算机完成用户自行设计的各种功能,相当于人的大脑.而机器人控制器则实现基本的运动控制,相当于人的小脑。如图1所示。在通用的计算机上可以自由地开发用户需要的各种控制功能,添加各种传感器等,实现网络功能自然是轻而易举的事情。
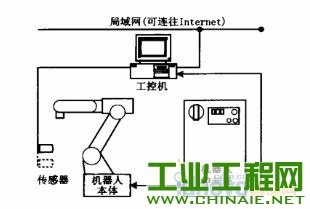 图1机器人网络模式 这样的控制方式不仅可以很方便地实现工业机器人网络控制,还可以大大扩充其应用领域,更好地实现用户的特殊要求,例如教学科研领域等。 这样的构想看起来很简单,但是它的主要难点在于建立附加控制器与机器人控制器的接口,从某种意义来讲就是要为工业机器人写驱动程序,也就是说将工业机器人当作类似打印机一样的外设,设计接口硬件,编写接口程序供用户调用。对于非开放性的工业机器人而言这无疑是很困难的,但是一巨完成这样的工作,对广大机器人用户.尤其是科研单位而言意义重大,省去了很多重复开发.因而具有很好的市场前景。 我们针对世界以及国内市场份额最大的安川机器人进行了研究,利用Motoman机器人原有通信接口以及部分系统10信号接口实现了安川机器人的网络控制与离线编程。 4 技术实现 我们要做的主要工作一方面是实现附加的本地控制器〔计算机)对机器人动作的控制,另一方面是提供一个标准的通信协议使得这种控制能够通过网络得以实施。这也就是软件系统两个七要的功能模块。 4.1 机器人控制 在本地计算机上控制Motoman机器人动作有三种方式:1,直接发送单条的运动指令;2、发送机器人执行文件,然后执行;3、在机器人上循环执行一个基于变t的通用文件,不断刷新位姿变量来控制机器人的运动。这三种方法各有优缺点.第i种最为基本,但是每次运动之间必然有传送数据的间隔,不能实现光滑连续的插补运动,而且也没有圆弧运动〔单点不能确定圆弧)。第2种适合批量运行,也能实现光滑的插补缺点是灵活性较差。第3种与第2种相反,灵活性较好,可以在运动中随时改变运动轨迹,特别适合研究工作,但是全程都需要上位机不中断的通信干预,对上位机要求高,可靠性较差。 综合以上特点我们选择第z和第3种方式来实现计算机对机器人的控制,由用户来选择合适的方式。两种方式的程序结构如图2与图3所示。第2种方式中在机器人卜执行的通用程序如图4所示。
 图2文件级网络控制

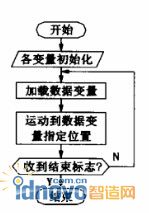 图4机器人的执行过程 两种方式本质上是统一的,都是从一个链表数据结构中获得各种运动参数,只不过,一个是批处理成一个文件下载执行,一个是逐条将这些参数以变量的形式传递给机器人控制器。 4.2 网络传输 接下来的问题是怎样组织数据文件。受到互联网上最流行的超文本格式html文件的启发,我们希望机器人的网络化通过类似的某种格式的文本方式实现。目前世界上还没有形成网络运动控制的标准语法,我们也无法要求客户都按照我们的数据结构来组织自己的数据,但是相对而言有一种格式的通用性最好,那就是数控上广泛使用的G代码。G代码不仅能较好地描述运动轨迹,而且世界上绝大多数CADJCAM软件都支持G代码的输出,例如著名的MasterCAM等,这就意味着通过这些成熟软件实现机器人的离线编程成为可能。通过对标准G代码的兼容和扩展。完全可以形成一种新的网络运动控制语法。 因此我们的基本构想就是采用服务器一客户端方式的网络结构。服务器从客户端接受基于G代码的控制文本,将之转化为合适的数据结构控制机器人运动。而客户端则可能是各种形式的,它可以是一个G代码的文本编辑器,也可以是某个CAD/CAM软件的功能模块,也可以是上位机整个控制系统中的一个功能模块,它的功能就是获得G代码文本并通过网络向服务器发送请求,值得注意的是服务器和客户端是可以在伺一台计算机上(本地计算机)运行的。通过socke编程,可以自由地实现这种服务器一客户端结构,如图5所示。
 图5服务器-客户端模式 实际上服务器就相当于标准的工业机器人驱动模块,用户程序按照G代码格式使用它,就如同在Windows系统下使用网络打印机一样便捷。当然,不同品种的机器人相应需要不同的驱动模块。 4.3 G代码处理 尽管G代码是一种成熟的工业标准,但是它并不是为机器人运动控制制订的。因此我们必须作相应的转换处理和扩展。 首先是坐标系的问题,机器人有多种定义坐标的方法,尤其是关节坐标是G代码所不支持的,而且各种机器人之间也各不相同,因此我们选择用户定义的直角坐标作为统一标准。 G代码一般使用起止点和国心坐标来描述圆弧运动,用G02和G03来区分方向.这在一般机床坐标中描述坐标平面上的圆弧是合适的,但是用来描述机器人的空间任惫圆弧运动是不够的,因为三点有重合或者共线(即整圆和半圆情况)时无法确定圆弧所在平面,在下维空间也无法确定顺时针、逆时针方向。而机器人所用的三点法描述圆弧则没有这方面间题,因此必须对G代码进行转换和扩展。我们定义G38标志使用圆心法描述圆弧. G 39标志使用三点法描述圆弧,这时I,J,K表示第,点(中间点)坐标,Gp2和G03没有区别为了保证与标准G代码的兼容,缺省是使用圆心法。值得注意的是圆心法描述的圆弧转化为机器人运动指令时也是通过数学公式转换为三点表示的只是针对整圆和半圆的情况加了一些限制条件。 G代码中本身有针对转动的描述.即A,B和〔功能字,这和机器人对姿态的描述是」致的,因此找们利用这三个坐标分量表示机器人姿态。但是很多适用于三自由度系统的CAD/CAM软件生成的G代码文件是没有姿态描述的,这就要求在计算中指定机器人姿态。较为简单的是指定一个固定的姿态,例如垂直于XY平面;复杂一些的是指定工具与运动轨迹及工件表面之间的夹角.通过坐标变换公式计算机器人姿态;更为复杂的姿态只能具体要求具体处理了。 4.4 机器人通信接口 Motoman机器人与计算机的接口有两种:R5232申行口和以太网,都属于选件功能。其中RS232是基本配置,以太网卡需要另行购买硬件。对于我们的研究而言两者功能上是等效的,都是“大脑‘,与“小脑”的联系方式,在应用层编程上是一致的,只有通信速度的差异 Motoman机器人的通信协议是一种带有应答信号和校验码的ASCII码文本通信,所有数据都是以文本方式传输的。通信格式大致分为二种,指令、数据和应答信号。 指令格式:
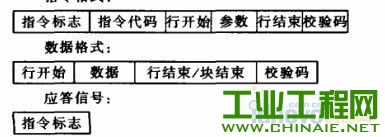 ASCII码控制字。校骏方法采用的是代码和校验。 以通信过程的主控方划分,机器人通信过程可以分为两种,机器人主叫和上位机主叫。前者即机器人程序主动运行.上位机始终处丁待机状态。只负责响应机器人请求,提供或者保存数据;后者即机器人处于远程通信模式下的待机状态,由Y位机通过远程指令控制,可以实现的控制有文件传输,变量和状态的输人输出,启动指定程序等。 以数据的流向划分,通信过程可以分为主叫方请求获取数据和请求发送数据两种情况。通信过程如图6所示(以请求获取数据为例)。
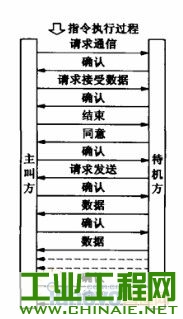 图6机器人与上位机通信 5 实验和结论(Conclusion ) 本研究所涉及的软件开发已经全部结束,我们在一台Motoman UP6机器人上进行了验证。结果证明完全实现了预想的设计要求,实现了工业机器人指令级的网络控制,不仅可以从远程计算机操作机器人运行,还实现了利用现有CAD/CAM软件进行机器人离线编程。我们在远程计算机上利用国产GAD/CAM软件“CARA制造工程师”进行了切削加工的离线编程。通过网络控制机器人雕刻立体文字。汉字字形复杂,运动控制点成百上千,人工示教编程工作全巨大,十分繁琐。用GAM软件自动编程只需数分钟即可完成,而且控制梢度是手工编程不能比拟的,体现了工业机器人加工精细复杂形体的能力。 可以预见,本研究成果的推广和应用将大大推动工业机器人的发展,扩展工业机器人应用领域,取得可观的社会和经济效益。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


