|
在现代化生产线中,机器人的使用已经越加的广泛,比如国内某大型企业,在生产现场有进万个不同种类的箱子用来装载不同种类的产品,然而各个箱子重量大有不同,最重的将近30KG,依然依靠人力搬运的时代显然已经成为过去,随着自动化程度的逐步提升,机器人的应用已经纳入了现代化生产流程之中,故此这家大型企业设想用机器人来代替这些辛苦的劳动工人,同时,我们沈阳莱茵机电有限公司代理的德国百格拉直角坐标机器人通过百格拉机器人多年总结的经验为这家企业解决了此问题,这就是百格拉的码垛机器人。 所谓码垛机器人主要由几个直线运动轴组成,通常分别对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角,通常X轴和Y轴是水平面内运动轴,Z轴是上下运动轴。直角坐标机器人的核心部件是直线运动轴,它是由精制铝型材、齿形带、直线运动导轨和伺服电机等组成。单根运动轴标准最大行程为5600mm,负载1~200公斤,定位精度0.05mm,最高运动速度8米/秒。按照具体应用对定位精度,有效行程,运行速度和负载大小,运动方式等来选择相应的导轨,并组合成相应形式的多维机器人来完成特定的任务。按其结构形式有30多种二维和三维机器人,还可以在Z轴上加上一个或两个旋转轴,构成四维和五维机器人。 多台直角坐标机器人按特定的组合构成,同步完成特定的任务。码垛机器人是最常见的组合,针对不同的应用形成多种标准形式的码垛机器人。下面我们按照以上所述以这家大型国企的的箱体码垛为例进行简要说明。 一:项目简介 1)搬运机器人自由度:龙门式,包括X轴、Y轴、Z轴3自由度,其中X轴带有1个无传动件的随动轴; 2)搬运机器人运动行程:X轴:2400mm以内,Y轴:1300mm以内,Z轴:1300mm以内,3轴连动; 3)搬运机器人末端最大负载:30KG(不含夹爪); 4)搬运机器人重复定位精度:3轴运动重复定位精度不大于0.1mm用百分表验收; 5)驱动与定位方式:AC伺服驱动,伺服定位; 6)以每分钟12米的速度运行时平稳,加速和减速平稳,没有明显的震动; 7)手爪开合平稳,有足够的抓取力,能抓牢箱体,保证在搬运过程中不会产生滑落现象; 8)搬运机器人能满足生产节拍,即每单位时间(1分钟以内)从传送带上抓取一个满箱,搬运到指定拍子上;连续搬运满箱并规则地码垛摆放到拍子上; 9)系统运行稳定,可靠,编程简单。 二:项目过程描述
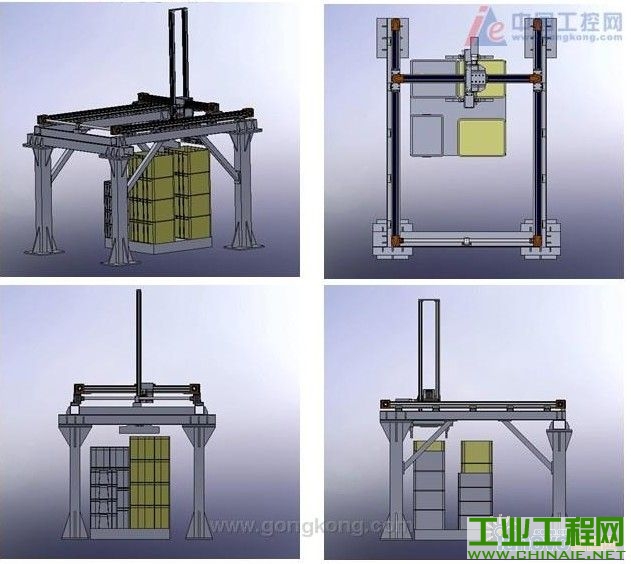
如以上图示,我们将三种不同类别的箱子编排成合理的顺序,放在传送带上传送到百格拉三维机器人手爪正下方,三维机器人则按照预先编订好的程序通过在三维空间内的运动将箱子摆放到指定的拍子上,通过此机器人使生产工人从繁重的劳动中解放出来,以从事更多的工作,也就大大提升了生产效率。下面我们将机器人具体的工作过程做以细致描述: 1) 传送带定位:不同种类的箱子放在传送带上以后,会通过伺服电机带动的传送带以很快的速度移动到机器人工作区域内,并且通过初步定位装置对箱子进行定位; 2) 机械手抓取:机械手内部由一个6NM步进电机带动,加持力可达到1000N,远远超出箱体所需力量,机械手两端夹爪设置三种箱子公用沟槽,可以同时满足现场需求,不需更换手爪; 3) 机器人运动过程:机械手抓取箱体之后,给出信号到机器人运动控制系统,机器人按事先编辑好的程序进行三维运动,具体运动过程可依照现场情况而定,三种不同重量的箱子分别按照三种程序轨迹来运动,最后都会合理有序的摆放到指定的拍子上; 4) 拍子搬运:机器人将箱子按照指定程序摆放到拍子上之后,通过运输车将拍子移动到成品摆放区域。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1