|
本文设计了一台用于热冲压运送物料工业机器人,它由电脑及程序自动控制。能完全代替人工,完成锻压生产过程中的连续上料、翻转、下料等危险性高、简单重复性、劳动强度高的工作,同时能有效降低劳动强度及危险性,提高生产自动化程度。提高生产效率。该机器人具有4个自由度,即腰关节、肩关节、肘关节和腕关节,其中腰关节、腕关节为转动关节,肩关节和肘关节为移动的关节;还有一个用于夹持物料的夹持器。通过分析机器人的组成,确定了传动方案和主要结构。 随着冲压生产技术向高速化、自动化、柔性化、精密化的方向发展,传统的机械化冲压生产已经无法满足要求。随着工业机器人技术的发展、成熟,它很快进入冲压行业。上下料机器人、压机中间翻转或穿梭传送装置等。再加上电控系统,组成的全自动冲压生产线。机器人冲压自动线可以方便地通过编程的方式改变机器人运动的轨迹和作业内容,具有较高的柔性,特别适合多品种,小批量的生产方式,从根本上改变传统的机械化生产线,是进行高速、高效、高质量冲压生产的一种有效的方式,是现代冲压生产技术的重要发展方向。 在国外,如日本、美国、德国等早已有类似的机器人系统及多种配有机器人的生产线,长期工作于锻压生产线上。我国是一个锻压大国,但用于锻压方面的机器人却很少,大多数企业的生产车间环境比较恶劣,生产设备相对落后,绝大多数生产过程都是由人工操作完成。导致生产效率低,产品质量不稳定。但进口设备价格昂贵对我国的锻造企业来说难以承受,这就迫切需要具有自主知识产权的锻压机器人。由于机器人手臂不仅要夹紧1100~1200℃的高温工件,而且本体在锻锤连续击打时受到极大的振动与冲击,此外还需要与现有的原始设备相配合使用,这为机器人的设计提出了很大挑战。 本文介绍了所设计的一台物料搬运机器人,它具有一定实际应用价值的、可用于高温情况下工作的热冲压机器人——用于搬运冲压前的工件。 1 总体方案及相关设计参数 目前,国内外使用的工业机器人中,其负载能力的范围很大,最小的额定负载在5N左右,最大可达上万牛顿。负载大小的确定主要考虑沿机器人各运动方向作用于机械接口处的力和扭矩。其中应包括机器人末端执行器的质量、抓取工件或作业对象的质量和在规定速度和加速度条件下,产生的惯性力矩。任务的要求是保证手腕部能承受的最大载荷为40kg。 工业机器人的工作范围是根据工业机器人作业过程中的操作范围和运动的轨迹来确定的,用工作空间来表示。工作空间的形状和尺寸则影响机器人的机械结构坐标型式、自由度数和操作机各手臂关节轴线间的长度和各关节轴转角的大小及变动范围的选择。本文所设计的工业机器人的工作范围为:垂直运动为0~800mm;绕自身轴线回转340°;水平运动为0~1500mm。 该机器人具有4个自由度:基座上的转台水平转动;提升机构带动手臂部位的上下移动:手臂的水平伸缩运动;夹持器夹持物料在竖直面内的转动。 图1所示为整体方案图。它主要由以下部分组成:基座;转动模块;提升模块;手臂模块。在手臂模块上装有夹持器;在基座上的输入接线盒,用以连接由控制装置来的电缆;装在提升模块上方的接线盒,用来将电缆连接到手臂提升和移动的驱动装置上。为了冷却,在高温区工作的夹持器和手臂的前面部分,提升模块立柱的上部有管路机头,水由软管进人手臂模块的内腔。
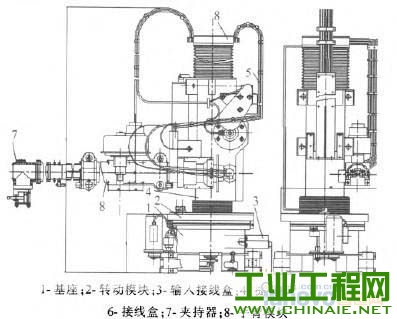 图1机器人整体结构图 热冲压机器人的转动角度为340°,提升手臂的距离为800mm,手臂伸缩的距离为1500mm,手腕末端夹持器的转动角度为90°。 2 主要部件的设计与选择 2.1 转动机构设计 图2为转动机构的主视图和剖视图。转动模块是用来在水平面内将手臂安装在预定的位置上,转动模块装在基座上,为使操作机有较大的稳定性,在基座的机体上铰链连接附加转动支撑。
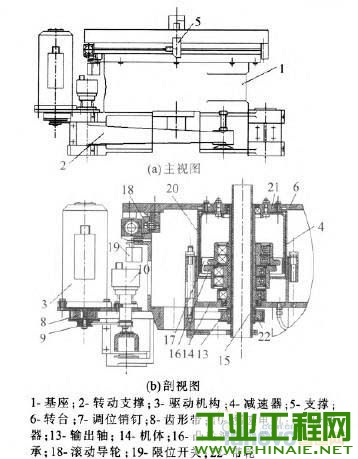 图2机器人的转动机构 转动模块由驱动机构、谐波齿轮减速器、带支撑的转台、调位销钉、管道和固接零件等组成。驱动装置的标准化由电动机和齿形带传动,它将运动传递到谐波齿轮减速器的从动带轮上去。由齿形带传动将运动传递到用来控制电动机速度的测速电机的驱动带轮上和位置传感器的带轮上。 带轮固定在输出轴上,它作成空心的,安装在机体和盖中的两个轴承上。运动由轴传动到凸轮波发生器上,在其上套有柔性轴承。运动由固定在盖上的柔轮传动到转台,转台的旋转是在以预紧力组装的滚动导轮上实现的。转台的转动极限角位置用限位开关来控制。 在转动机构中,主要运用到了谐波齿轮减速器(减速比i=1/100)这一关键部件。电机输出的转速,经由减速器把转速降到额定范围内。谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用钢轮与柔轮齿数差等于波数,即:z1-z2=n。式中z2、z1分别为钢轮与柔轮的齿数。 当钢轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为卢i=-z1/(z2-z1)。双波传动中,z2-z1=2,柔轮齿数很多。式中负号表示柔轮的转向与波发生器的转向相反。由此可看出。谐波减速器可获得很大的传动比。可以根据传动比公式选定合适的钢轮和柔轮齿数。由此可以推测出其传动比。为实现100倍的传动转速下降,选择钢轮齿数144,柔轮齿数160,经计算,i=-160/(144-160)=100,得到的减速比适合转台的旋转要求。 2.2 操作机提升机构设计 图3为提升结构的主视图和剖视图。提升模块用来实现手臂的垂直移动,并将其定位在预定程序的位置上。手臂提升模块包括:安装在转动模块转台上的立柱,沿立柱的导轨在滚轮的小车上:用于手臂移动的支架和行程开关的支架;手臂平衡用气缸;导轨的保护装置。在立柱上还有系列横槽,用来把挡块安装在所需的高度,以限制小车位移。
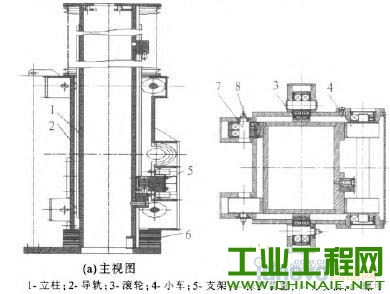 图3机器人的提升机构 为了消除小车运动时的间隙,在滚轮和导轨之间,在每一对相对位置的滚轮上都有偏心轴。在轴转动时,滚轮就可以向导轨靠近,从而选择在动态结合中的间隙。在选好间隙以后,轴由螺母紧固。 2.3 手臂及挟持器设计 手臂直线运动机构:机器人手臂的伸缩,横向移动、纵向移动均属于直线运动。实现手臂往复直线运动的机构形式比较多,常用的有活塞油(气)缸,齿轮齿条机构,丝杠螺母机构以及连杆机构等。由于直流伺服电机特有的便于控制的特性而且它自身又具有转矩较大,响应迅速,因而在机器人结构中应用的比较多。本文中手臂的伸缩即直线运动部分采用直流伺服电机直接带动一级减速齿轮,继而带动齿轮齿条机构运动实现手臂的收缩。 手腕回转运动机构:手臂回转运动实现形式很多,常用的有叶片式回转缸,齿轮传动机构,链轮传动机构,活塞缸和连杆机构等。本文采用由电动机通过联轴器带动谐波减速器。进而带动轴进行运转,通过锥齿轮机构实现手腕的转动。 夹持器夹紧机构:对于夹紧器由于在加紧工件时机械手臂前半部分。手腕、夹持器处于1100℃的高温环境中,因此要求夹持器应该响应快、夹紧力稳定、而且不能有可燃的液体或其他可燃性物质处于此环境中,因此选用后置的气缸来加紧。以实现对工件的稳定夹紧。因篇幅所限图略。 3 结论 本文介绍了热冲压操作工业机器人的总体结构及设计的相关参数。并对主要部件转动机构及提升机构的具体结构加以阐述。目前国内对热冲压机器人的研究还正处于一个探索的阶段,针对这方面的研究可以填补这方面的空白,进一步实现中国锻造制造系统的现代化。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09


 /1
/1 


