|
0 前言 随着机器人技术的发展,农业、林业和建筑业等领域将成为机器人应用的广阔天地。在这些领域内的工作(如果树上果子的采摘,树林中树木枝叶的修剪,桥梁上钢架的喷漆检修等)都具有一些相同的特点:①高空作业,工作地点离地面较高;②工作环境复杂和恶劣,危险性高;③工作量大,消耗的时间很长,单调乏味。鉴于以上特点,开发具有攀爬功能的机器人代替人去从事这些高空危险工作将有重要意义。目前,国内外已经认识到这点,开始研究攀爬类机器人并开发出一些样机。日本早稻田大学已经开展了爬树机器人的研制,在2005年爱知国际博览会上展出了其原型机WOODY-1。西班牙开发了基于并联机器人的爬树机器人CPR。这两种机器人都由上下两个相同的环形部分组成,其中一环抱着树干时,另一环可松开,由连杆驱动顺着树干作上下移动,如此往复交替,使整个系统升降:伊朗研制了一种爬杆机构UT-PCR,该机构由三角形支架和端头安装有轮子的连杆组成,适用于圆柱杆件的攀爬;美国卡内基梅隆大学等几所大学提出了另一种思路,从仿生学角度开展爬树机器人项目RiSE的研究,其样机为六足机器人,能像蟑螂一样贴着树干爬行。麻省理工学院研制了一种能爬窗梁的机器人Shady3D,能顺着窗架爬行移动。哈尔滨工业大学正在研发爬桁架的机器人,其主要目的是面向桥梁、体育场馆、塔类等基础设施的检测和维修。北京航空航天大学和德国汉堡大学合作,研制了仿毛毛虫的多关节微小型机器人,能在平整光洁的表面上爬行。中国科学院沈阳自动化研究所研制了一种5自由度爬壁机器人,可以通过两个吸盘的交替吸附和各个关节的配合灵活地实现尺蠖式爬行和转向,并且能够在一定夹角范围的壁面之间实现过渡。 总体来看,现有的样机基本实现了一定的攀爬功能,但都还存在不足:①攀爬对象单一,只能爬杆、爬桁架或者爬树而难以攀爬不同的对象;②受到自身结构限制,缺乏杆间攀爬过渡的能力,难以适应复杂的环境:③缺乏操作功能,作业时必须另外加装执行器或操作臂。 受到尺蠖、猿猴、树懒等生物爬树原理的启发,本文提出了一种5自由度攀爬机器人。该机器人由3个摆动关节、2个回转关节和2个末端夹持器串联而成。其中,末端的2个夹持器可以看成机器人的两手爪,中间的5个关节和连杆构成机器人本体。其特点包括:①机器人具有较强的攀爬功能,能爬杆、桁架和树木等多种对象,能在空间两杆之间过渡攀爬;②由于具有足够多的自由度,可以采用多种不同的步态进行攀爬;③机器人本身也是一个操作臂,具有操作功能,不需要安装额外的操作装置。在结构上采用模块化设计方法。模块化机器人具有研发成本低,结构和功能的扩展性强等优点,是当前机器人系统研发的一个趋势。GUAN等已经就模块化机器人做了相关的工作,设计制造了多种独立完整的机器人单自由度关节模块和末端功能模块,包括一种回转关节模块、一种摆转关节模块和一种夹持器模块,并由这些模块构建了多种不同的机器人系统。 本文对上述仿生攀爬机器人进行基础研究,就其构型、运动学作基本介绍,提出、分析和比较三种可能的不同攀爬步态,通过仿真计算和比较不同步态所需的最大关节转矩和功率消耗,为攀爬规划提供基本依据。 1 机器人构型和攀爬运动分析 1.1 机器人的构型 这里用5个单自由度关节模块依次串接构建机器人本体。3个摆转关节模块(关节轴与连杆轴垂直,称之为T型)在中间,关节轴线互相平行;两个回转关节模块(关节轴与连杆轴共线,称之为I型)分布在两端,其轴线与摆转关节的互相垂直。两个夹持器模块分别连接在本体的两端,这样组成两端对称、首尾互置的双手爪式攀爬机器人。其CAD模型和机构示意如图1所示(图1中字母T、I和G分别代表摆转关节、回转关节和夹持器,下同)。3个摆动关节的转动范围是-110°~110°,外径为100mm,长度为238mm,质量为2.5kg,最大输出转矩117N·m。2个回转关节可以做-180°~180°的全方位转动,外径为100mm,长度为165mm,质量为2.5kg,最大输出转矩150N·m。夹持器模块(称之为G型模块)夹持圆柱形杆件的范围为450~120mm,最大夹持力300N,质量2.2kg。 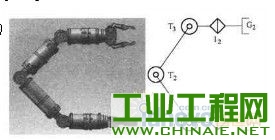 图1 模块化仿生攀爬机器人的CAD模型和机构简图 图1 模块化仿生攀爬机器人的CAD模型和机构简图 1.2 空间杆间攀爬过渡运动分析 机器人攀爬时,一端的夹持器抓紧杆件以支撑整个系统,另一端夹持器运动到目标位置和姿态,夹紧目标杆件后松开前一个夹持器,两个夹持器交替抓夹,角色互换。目标端夹持器对于参考坐标系的位置和姿态相可以用一个矩阵来表示,即  式中,n,o,a为夹持器的姿态矢量,P为夹持器的位置矢量。虽然实现三维空间的任意位姿需要机器人具有6自由度,但考虑到机器人攀爬的对象一般为杆件和树木等,它们的横截面多数可视为圆形。在这种情况下5自由度机器人一般可以满足要求,能够实现从攀爬过渡。下面进行证明。 机器人初始姿态和坐标系的建立如图2所示。根据机器人运动学的D-H描述方法,每一个位姿的变换矩阵可以表达为 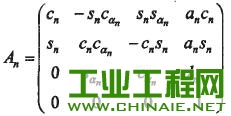 式中,Cn=cosθn,Sn=sinθn,Cαn=cosαn,Sαn=sinαn。 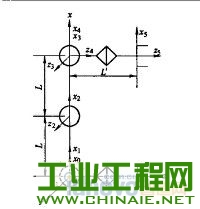 图2 机器人运动学参考坐标系 于是抓取目标端夹持器的位姿可以表示为  对于圆柱状杆件,为使夹持器能够夹住目标杆件,必须满足以下两个条件:①夹持器能移动到达目标位置;②夹持器开合方向与杆的倾斜方向垂直。其中,夹持器的位置矢量由式(1)中p给出,其开合方向的法向矢量由式(1)中n给出。 设抓取目标杆的方向矢量为(ax by cz)T,则夹持器的目标位置的集合都可以由p给出  式中,k为一固定系数,po=(xo yo zo)T为任意一个可实现抓取的目标位置坐标。 令n=(ax by cz)T,并将式(1)代入式(2)中,得  等式两边依次左乘矩阵A-1i,可以角度进行解偶。由于矢量n和p提供了5个已知量,在解偶过程中可以分别解出θ1~θ5的值  或  或  或 当解出θ1~θ5的值分别都在各关节的极限转角范围内时,机器人便可以实现此杆件的抓取,从而实现攀爬的过渡。 应该指出,由于只有5自由度,任意两杆件的过渡位形只有一个。在树上或桁架中攀爬时,由于环境复杂,障碍很多,要实现灵巧避碰穿梭攀爬,应增加关节模块使机器人自由度达到6以上。 3 攀爬仿真与分析 从第2节看到,在不同的攀爬步态中起主要作用的关节是不同的。这样机器人采用不同的步态攀爬时,主要关节的转矩和机器人所消耗的能量会有所不同。下面对此作分析和比较。 在ADAMS环境下,对机器人在不同方位杆件上以不同步态攀爬进行仿真。在仿真中作如下假设:①机器人夹持器总能够提供足够大的夹持力;②机器人自身的摩擦忽略不计。 为了使不同的攀爬步态有可比性,机器人应该以这三种步态在相同时间内攀爬相同的高度。在仿真中设定机器人在30s内爬升0.78m(一个L的长度)。这个距离正是采用扭转步态和翻转步态时伸展攀爬一个循环的最大步距。那么采用尺蠖步态时,机器人应在以最大步距0.33m完成两个攀爬循环,每个循环的时间为12.9s。 图6为机器人攀爬仿真的一个场景。机器人在竖直杆上攀爬时部分关节的转矩和功率消耗曲线如图7~9所示。 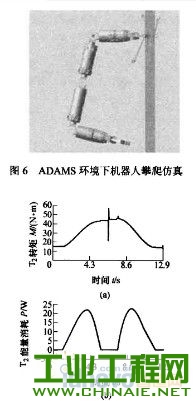
图9 翻转步态中主要关节T3的转矩和功率变化 在图7所示的尺蠖步态攀爬中看到关节转矩在6.45s时刻有剧烈的突变。这是由于在这个时刻,两个夹持器同时夹住杆件,造成了机器人的过约束,从而使关节转矩值异常。同样的情况在图9中也可以看到。实际系统中,由于机器人自身拥有一定的弹性和柔顺性变形,将不会发生这种情况。
| 







 /1
/1