|
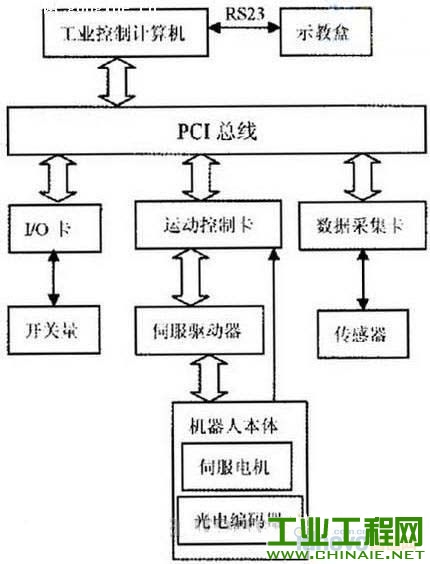
涂装是制造业中一项非常重要的工序,它能有效地防止工件受外界环境侵蚀,提高工件寿命,而且能美化工件外观。目前在国内,涂装工序主要还是靠人工完成,涂装的质量受工人的技术熟练程度、心情等因素的影响很大。同时,涂装过程中挥发出来的有毒气体对工人的身体健康影响很大。实现涂装过程自动化,具有巨大的社会与经济效益。喷涂机器人就是一种典型的涂装自动化装备。使用机器人进行喷涂作业,工件涂层均匀,重复精度好,工作效率高,能使工人从恶劣的工作环境中解放出来。国际上将机器人应用到喷涂领域已有二十多年的历史,最早将机器人技术应用于喷涂的有美国的minihit公司、fudge公司、德国的hatel公司等。 随着机器人技术的不断完善,喷涂精度得到显著提高,喷涂机器人在主要的发达国家得到广泛的应用。我国的华南理工大学、华中科技大学等科研机构先后对喷涂机器人技术进行深入的研究,取得了不少进展。航天航空部的703所、625所使用热喷涂机器人进行作业,用来喷涂一些重要而特殊航空部件。目前在我国,还没有完全意义上的独立生产喷涂机器人的厂家,机器人市场大多为欧美、日本、韩国等国的生产厂家所垄断。近年来,我国的一些企业积极与高校开展喷涂机器人的项目合作,进一步推动我国喷涂机器人技术的成熟,普及与应用。 1 喷涂机器人的种类 1.1 仿形喷涂机器人 仿形喷涂机器人根据被喷涂工件的外形特点,简化机器人本体的结构与控制方式,造价低廉,维修简便,喷涂质量基本上能满足工业的需求。据国外公司统计的数字显示,采用仿形喷涂机器人进行作业,喷房内部尺寸可减少2/3,排风量减少3/5,漆雾处理的冲水流量减少1/3,涂料节省大概30%~50%。仿形喷涂机器人广泛应用于汽车、铁路机车车辆等机械制造业的喷涂作业,用于完成被工件顶部与侧面的喷涂。相关资料介绍了一种用于汽车车身喷涂的仿形喷涂机器人,该机器人模仿汽车车身的形状,同时在顶部与侧面各安装喷枪,喷枪固定在机架上,喷枪与车身的距离、角度可以调解,以满足不同型号的车身的喷涂需要。机器人采用PLC控制方式,整个系统可靠性高,组态可灵活调整,编程方便,调试维护简单,对不同车型的车身通过编程即可达到仿形编程目的。 1.2 移动式喷涂机器人 这类机器人主要用于高空的喷涂作业,如大楼、桥梁的高空喷涂等,配备缆绳、真空或磁吸附装置,充当机器人的下肢,使机器人能够在高空喷涂作业的同时进行移动。相关资料介绍一种缆索机器人,用于斜拉桥的高空喷涂,利用PLC作为机器人的控制系统,机器人系统运行稳定,可靠性高,可满足斜拉桥高空喷涂的需要。还有一种用于高层建筑喷涂作业的移动机器人,以真空吸附的方式进行高层建筑物的喷涂作业,机器人由支援系统、机器人本体、控制系统组成。其中支援系统包括移动小车、卷缆部件、悬挂装置;控制系统采PLC控制。机械手采用往复运动的方式,同时在喷涂机械手上还安装了两套CCD摄像系统,可从支援小车的监视器实时监视喷涂作业情况和墙面喷涂的质量。该机器人的推广应用提高了高层建筑喷涂作业的质量、工作效率和安全可靠性,降低工人的工作量。 1.3 经济型简易喷涂机器人 这类机器人本质上是一种三自由度直角坐标机器人,采用龙门架式的框架结构,配备有专门的夹具,进行喷涂作业时,须先手工将被喷涂工件夹紧到工作台上,再操纵机器人进行喷涂。主要用于手机、计算机键盘等小型电子产品外壳的喷涂作业,该机器人结构简单、操作简便易行,且成本较低。但系统功能单一,一般只能用于小型件的喷涂作业。 1.4 固定式多自由度喷涂机器 这种机器人常固定于喷涂生产线的两侧,作业时被工件通过输送带送入生产线,再由机器人对工件进行喷涂作业,这种机器人常为回转式关节型机器人,常见的是5、6自由度关节机器人。机器人的控制系统常采用在工控机上插入输入输出I/O卡和运动控制卡的模式,再通过计算机高级语言编程实现整个喷涂作业过程的自动化,可适用于各种不同场合的喷涂作业需要。 2 喷涂机器人运行方式 2.1 示教型喷涂机器人 这种方式必须首先确定机器人在喷涂件表面的运动轨迹,先操纵机器人沿运动轨迹空走一遍,即对机器人进行示教。在示教过程中,机器人记录下各个示教点的轨迹坐标,在真正喷涂过程中,机器人根据先前记录下来的示教点对工件进行自动喷涂作业,示教点之间的曲线部分采用插补算法确定各个插补点坐标,以逼近原曲线轨迹,最后通过机器人正逆解运算求出每一关节转过的角度。 2.2 离线编程式喷涂机器人 这种方式首先获取被喷涂对象的立体几何形状,然后采用各种算法确定出工件表面的喷涂点坐标,机器人根据已确定的点坐标进行自动喷涂作业。喷涂点之间的曲线部分通过插补运算确定插补点坐标,以逼近原曲面,最后通过机器人正逆解运算将插补坐标从三维空间转换成各个关节角度空间。 3 喷涂机器人的控制方式 工业中应用的机器人控制系统一般采用二级控制方式,其中工控机充当主控制器,用于整个控制流程的协调与调度,第二级控制器用于喷涂机器人的运动控制。一种工控机加DSP的控制模式,工控机充当一级控制器,负责系统管理,机器人语言编译与人机接口等功能;DSP充当二级控制器,主要负责机器人的运动控制,包括了机器人运动正逆解运算、插补运算、关节的位置控制等功能。工控机与DSP不直接进行通讯,通过公用内存交换数据,工控机与DSP均可从该内存中读取数据,以达到通讯的目的。 当前比较通用的是工控机加上运动控制卡的模式,即将运动控制卡插入工控机的PCI插槽中,工控机与运动控制卡之间通过PCI总线进行通讯。工控机负责系统的文件管理、系统参数设置、机器人语言的解释、示教检查、系统程序的协调调度、故障诊断、机器人运动学正逆解与插补运算等功能。运动控制卡只担负机器人的运动控制功能,增强了机器人运动的实时性。人机接口功能由插在工控机上专用的I/O卡来完成,I/O卡将设备运行状况、行程限位开关等信息以开关量的形式实时反馈给工控机,工控机根据读取到的信息做出相应的反应。示教盒与主机通过RS232总线进行通讯。控制系统硬件结构通常包括了工控机、运动控制卡、I/O卡、示教盒、伺服电机等部件,硬件控制系统结构如图1所示。
 4 喷涂机器人技术难点 4.1 喷涂工件CAD造型的获取 喷涂机器人离线编程的第一步是必须获取喷涂工件的CAD数据,将工件的设计阶段与加工制造阶段集成起来,从工件设计阶段直接获取其CAD数据,再根据所获取的CAD数据进行路径规划。使用三维激光扫描仪进行扫描,获取工件实物表面的数据,形成点云,再通过三维重构,获取工件的CAD实物数据。使用机械式探针沿工件表面滑动,以获得工件表面数据,再对工件表面数据进行日样条拟合,最终重构出工件的三维模型。随着计算机视觉技术的成熟,可以利用模式识别技术先识别出待喷涂的工件,再利用图像处理技术提取工件表面的特征点,形成数据点云,最后通过图像的三维重构获取工件的CAD数据。 4.2 喷涂路径规划 路径规划是喷涂机器人离线编程的另一项关键技术。路径规划的好坏,直接关系到喷涂作业的效率以及工件表面的涂层是否均匀,对喷涂工件的质量的影响巨大。在获取到工件的CAD数据后,基于有限元的思想,以三角形小单元来近似逼近工件曲面,提取各个三角形单元的中点作为喷涂点,连接各个喷涂点获取喷涂路径。将获取到的工件CAD数据转换成STL文件,基于快速成形的切片技术将工件的三维模型进行分层,将各层的点数据进行矢量扩展,得到一系列有方向的点系,最后按照一定的排列顺序形成喷涂机器人的喷涂轨迹。采用虚拟现实技术,先构建喷涂过程的虚拟过程,在虚拟的环境下进行喷涂作业,定义最优的喷涂轨迹,同时将所定义的轨迹转换成最终执行的机器人语言。根据喷枪在工件表面的涂层累积速率数学模型,构建工件曲面上任意一点的涂层厚度数学表达式,用于优化的方法,在曲面的函数空间内寻求一条最优路径的函数表达式,由此得出喷涂的轨迹路径。 4.3 喷涂机器人的位姿精度与标定 影响喷涂机器人位姿的精度有多方面的原因,从大体上讲可分为静态与动态因素。静态因素包括了制造、装配时所带来的机器人本体机械结构上的误差;由外界温度的改变和长期的磨损而引起的机械部件的尺寸变化,由此造成机器人位姿的误差。动态因素主要是由外力所引起的机械部件本身的弹性变形所带来的机器人运动误差。为解决以上因素所造成的机器人位姿误差,必须在使用前对机器人进行标定,建立机器人的参照模型,目前用于机器人标定的技术有基于三坐标测量仪的标定、基于激光跟踪仪的机器人标定以及基于 CCD的机器人标定。根据机器人实际运行时的位姿与参照模型间的误差,建立机器人补偿机制,以进一步提高机器人喷涂作业的精度。 4.4 喷涂机器人的控制 喷涂机器人的控制较为常用的仍是传统的PID理论,在实际的应用中,喷涂机器人机械臂的长度往往很长,当整个机械臂伸展开时大约可达到2m的长度,且运行速度较高,各关节间的动力学效应非常显著,不能忽略,从而造成机器人各关节的被控对象模型是时变的。而传统PID理论的比例(P)、积分(I)、微分(D)参数的整定是建立在关节传递函数模型为定值基础之上的,这对传统的基于系统动力模型的控制理论带来了挑战。此外,实际工业现场往往存在有各种不确定的干扰,也会对PID控制器造成影响。以上两个因素决定了PID控制器必须具备一定的自适应性,其比例、积分、微分参数应能够随着外界环境的改变而自动的变化。智能控制理论的提出与发展为问题的解决带来了新的思路。智能控制是人工智能、生物学与自动控制原理结合的产物,是一种模仿生物某些运行机制的、非传统的控制方法。将神经网络、模糊理论、人工免疫、遗传进化等智能控制算法与PID理论相结合,用于PID参数的整定,成为未来机器人控制发展的趋势。 5 结论 本文介绍了喷涂机器人技术的研究进展情况,叙述了常见的喷涂机器人种类、运行方式、控制方式及其控制系统的结构体系,深入分析喷涂机器人的主要技术难点。展望未来,喷涂机器人离线编程技术方面,基于视觉的工件CAD模型构建方式与通过建立工件表面涂层累积量数学模型的机器人路径规划方法是未来发展的方向。机器人的位姿精度与标定技术方面,基于CCD的标定法是趋势。机器人控制领域,新型智能控制算法之间、智能算法与传统PID控制算法间的融合与应用是未来机器人控制发展的趋势。随着传感检测技术与人工智能的发展,未来的喷涂机器人将具备实时检测,实时自主规划喷涂路径的能力,喷涂机器人将进一步朝着智能化的方向发展。 |

2020-02-17

2022-06-13

2021-12-13

2022-10-20

2022-11-09



 /1
/1 

